Pt. 60, App. C
Appendix C to Part 60—Qualification Performance Standards for Helicopter Full Flight Simulators
Begin Information
This appendix establishes the standards for Helicopter FFS evaluation and qualification. The NSPM is responsible for the development, application, and implementation of the standards contained within this appendix. The procedures and criteria specified in this appendix will be used by the NSPM, or a person assigned by the NSPM, when conducting helicopter FFS evaluations.
Table of Contents
1. Introduction.
3. Definitions (§ 60.3).
4. Qualification Performance Standards (§ 60.4).
5. Quality Management System (§ 60.5).
6. Sponsor Qualification Requirements (§ 60.7).
7. Additional Responsibilities of the Sponsor (§ 60.9).
8. FFS Use (§ 60.11).
9. FFS Objective Data Requirements (§ 60.13).
10. Special Equipment and Personnel Requirements for Qualification of the FFS (§ 60.14).
11. Initial (and Upgrade) Qualification Requirements (§ 60.15).
12. Additional Qualifications for a Currently Qualified FFS (§ 60.16).
13. Previously Qualified FFSs (§ 60.17).
14. Inspection, Continuing Qualification Evaluation, and Maintenance Requirements (§ 60.19).
15. Logging FFS Discrepancies (§ 60.20).
16. Interim Qualification of FFSs for New Helicopter Types or Models (§ 60.21).
17. Modifications to FFSs (§ 60.23).
18. Operations with Missing, Malfunctioning, or Inoperative Components (§ 60.25).
19. Automatic Loss of Qualification and Procedures for Restoration of Qualification (§ 60.27).
20. Other Losses of Qualification and Procedures for Restoration of Qualification (§ 60.29).
21. Record Keeping and Reporting (§ 60.31).
22. Applications, Logbooks, Reports, and Records: Fraud, Falsification, or Incorrect Statements (§ 60.33).
23. [Reserved]
24. [Reserved]
25. FFS Qualification on the Basis of a Bilateral Aviation Safety Agreement (BASA) (§ 60.37).
Attachment 1 to Appendix C to Part 60—General Simulator Requirements.
Attachment 2 to Appendix C to Part 60—FFS Objective Tests.
Attachment 3 to Appendix C to Part 60—Simulator Subjective Evaluation.
Attachment 4 to Appendix C to Part 60—Sample Documents.
Attachment 5 to Appendix C to Part 60—FSTD Directives Applicable to Helicopter FFSs
End Information
1. Introduction
Begin Information
a. This appendix contains background information as well as regulatory and informative material as described later in this section. To assist the reader in determining what areas are required and what areas are permissive, the text in this appendix is divided into two sections: “QPS Requirements” and “Information.” The QPS Requirements sections contain details regarding compliance with the part 60 rule language. These details are regulatory, but are found only in this appendix. The Information sections contain material that is advisory in nature, and designed to give the user general information about the regulation.
b. Questions regarding the contents of this publication should be sent to the U.S. Department of Transportation, Federal Aviation Administration, Flight Standards Service, National Simulator Program Staff, AFS-205, 100 Hartsfield Centre Parkway, Suite 400, Atlanta, Georgia, 30354. Telephone contact numbers for the NSP are: phone, 404-832-4700; fax, 404-761-8906. The general e-mail address for the NSP office is: 9-aso-avr-sim-team@faa.gov. The NSP Internet Web site address is: http://www.faa.gov/safety/programs_initiatives/aircraft_aviation/nsp/. On this Web Site you will find an NSP personnel list with telephone and e-mail contact information for each NSP staff member, a list of qualified flight simulation devices, ACs, a description of the qualification process, NSP policy, and an NSP “In-Works” section. Also linked from this site are additional information sources, handbook bulletins, frequently asked questions, a listing and text of the Federal Aviation Regulations, Flight Standards Inspector's handbooks, and other FAA links.
c. The NSPM encourages the use of electronic media for all communication, including any record, report, request, test, or statement required by this appendix. The electronic media used must have adequate security provisions and be acceptable to the NSPM. The NSPM recommends inquiries on system compatibility, and minimum system requirements are also included on the NSP Web site.
d. Related Reading References.
(1) 14 CFR part 60.
(2) 14 CFR part 61.
(3) 14 CFR part 63.
(4) 14 CFR part 119.
(5) 14 CFR part 121.
(6) 14 CFR part 125.
(7) 14 CFR part 135.
(8) 14 CFR part 141.
(9) 14 CFR part 142.
(10) AC 120-35, as amended, Line Operational Simulations: Line-Oriented Flight Training, Special Purpose Operational Training, Line Operational Evaluation.
(11) AC 120-57, as amended, Surface Movement Guidance and Control System (SMGCS).
(12) AC 120-63, as amended, Helicopter Simulator Qualification.
(13) AC 150/5300-13, as amended, Airport Design.
(14) AC 150/5340-1, as amended, Standards for Airport Markings.
(15) AC 150/5340-4, as amended, Installation Details for Runway Centerline Touchdown Zone Lighting Systems.
(16) AC 150/5340-19, as amended, Taxiway Centerline Lighting System.
(17) AC 150/5340-24, as amended, Runway and Taxiway Edge Lighting System.
(18) AC 150/5345-28, as amended, Precision Approach Path Indicator (PAPI) Systems
(19) AC 150/5390-2, as amended, Heliport Design
(20) International Air Transport Association document, “Flight Simulator Design and Performance Data Requirements,” as amended.
(21) AC 29-2, as amended, Flight Test Guide for Certification of Transport Category Rotorcraft.
(22) AC 27-1, as amended, Flight Test Guide for Certification of Normal Category Rotorcraft.
(23) International Civil Aviation Organization (ICAO) Manual of Criteria for the Qualification of Flight Simulators, as amended.
(24) Airplane Flight Simulator Evaluation Handbook, Volume I, as amended and Volume II, as amended, The Royal Aeronautical Society, London, UK.
(25) FAA Publication FAA-S-8081 series (Practical Test Standards for Airline Transport Pilot Certificate, Type Ratings, Commercial Pilot, and Instrument Ratings).
(26) The FAA Aeronautical Information Manual (AIM). An electronic version of the AIM is on the Internet at http://www.faa.gov/atpubs.
(27) Aeronautical Radio, Inc. (ARINC) document number 436, titled Guidelines For Electronic Qualification Test Guide (as amended).
(28) Aeronautical Radio, Inc. (ARINC) document 610, Guidance for Design and Integration of Aircraft Avionics Equipment in Simulators (as amended).
End Information
Begin Information
No additional regulatory or informational material applies to § 60.1, Applicability, or to § 60.2, Applicability of sponsor rules to person who are not sponsors and who are engaged in certain unauthorized activities.
End Information
3. Definitions (§ 60.3)
Begin Information
See Appendix F of this part for a list of definitions and abbreviations from part 1 and part 60, including the appropriate appendices of part 60.
End Information
4. Qualification Performance Standards (§ 60.4)
Begin Information
No additional regulatory or informational material applies to § 60.4, Qualification Performance Standards.
End Information
5. Quality Management System (§ 60.5)
Begin Information
See Appendix E of this part for additional regulatory and informational material regarding Quality Management Systems.
End Information
6. Sponsor Qualification Requirements (§ 60.7)
Begin Information
a. The intent of the language in § 60.7(b) is to have a specific FFS, identified by the sponsor, used at least once in an FAA-approved flight training program for the helicopter simulated during the 12-month period described. The identification of the specific FFS may change from one 12-month period to the next 12-month period as long as that sponsor sponsors and uses at least one FFS at least once during the prescribed period. There is no minimum number of hours or minimum FFS periods required.
b. The following examples describe acceptable operational practices:
(1) Example One.
(a) A sponsor is sponsoring a single, specific FFS for its own use, in its own facility or elsewhere—this single FFS forms the basis for the sponsorship. The sponsor uses that FFS at least once in each 12-month period in that sponsor's FAA-approved flight training program for the helicopter simulated. This 12-month period is established according to the following schedule:
(i) If the FFS was qualified prior to May 30, 2008, the 12-month period begins on the date of the first continuing qualification evaluation conducted in accordance with § 60.19 after May 30, 2008, and continues for each subsequent 12-month period;
(ii) A device qualified on or after May 30, 2008, will be required to undergo an initial or upgrade evaluation in accordance with § 60.15. Once the initial or upgrade evaluation is complete, the first continuing qualification evaluation will be conducted within 6 months. The 12 month continuing qualification evaluation cycle begins on that date and continues for each subsequent 12-month period.
(b) There is no minimum number of hours of FFS use required.
(c) The identification of the specific FFS may change from one 12-month period to the next 12-month period as long as that sponsor sponsors and uses at least one FFS at least once during the prescribed period.
(2) Example Two.
(a) A sponsor sponsors an additional number of FFSs, in its facility or elsewhere. Each additionally sponsored FFS must be—
(i) Used by the sponsor in the sponsor's FAA-approved flight training program for the helicopter simulated (as described in § 60.7(d)(1)); or
(ii) Used by another FAA certificate holder in that other certificate holder's FAA-approved flight training program for the helicopter simulated (as described in § 60.7(d)(1)). This 12-month period is established in the same manner as in example one; or
(iii) Provided a statement each year from a qualified pilot, (after having flown the helicopter, not the subject FFS or another FFS, during the preceding 12-month period) stating that the subject FFS's performance and handling qualities represent the helicopter (as described in § 60.7(d)(2)). This statement is provided at least once in each 12-month period established in the same manner as in example one.
(b) There is no minimum number of hours of FFS use required.
(3) Example Three.
(a) A sponsor in New York (in this example, a Part 142 certificate holder) establishes “satellite” training centers in Chicago and Moscow.
(b) The satellite function means that the Chicago and Moscow centers must operate under the New York center's certificate (in accordance with all of the New York center's practices, procedures, and policies; e.g., instructor and/or technician training/checking requirements, record keeping, QMS program).
(c) All of the FFSs in the Chicago and Moscow centers could be dry-leased (i.e., the certificate holder does not have and use FAA-approved flight training programs for the FFSs in the Chicago and Moscow centers) because—
(i) Each FFS in the Chicago center and each FFS in the Moscow center is used at least once each 12-month period by another FAA certificate holder in that other certificate holder's FAA-approved flight training program for the helicopter (as described in § 60.7(d)(1)); OR
(ii) A statement is obtained from a qualified pilot (having flown the helicopter, not the subject FFS or another FFS during the preceding 12-month period) stating that the performance and handling qualities of each FFS in the Chicago and Moscow centers represents the helicopter (as described in § 60.7(d)(2)).
End Information
7. Additional Responsibilities of the Sponsor (§ 60.9).
Begin Information
The phrase “as soon as practicable” in § 60.9(a) means without unnecessarily disrupting or delaying beyond a reasonable time the training, evaluation, or experience being conducted in the FFS.
End Information
8. FFS Use (§ 60.11)
Begin Information
No additional regulatory or informational material applies to § 60.11, FFS Use.
End Information
9. FFS Objective Data Requirements (§ 60.13)
Begin QPS Requirements
a. Flight test data used to validate FFS performance and handling qualities must have been gathered in accordance with a flight test program containing the following:
(1) A flight test plan consisting of:
(a) The maneuvers and procedures required for aircraft certification and simulation programming and validation
(b) For each maneuver or procedure—
(i) The procedures and control input the flight test pilot and/or engineer used.
(ii) The atmospheric and environmental conditions.
(iii) The initial flight conditions.
(iv) The helicopter configuration, including weight and center of gravity.
(v) The data to be gathered.
(vi) All other information necessary to recreate the flight test conditions in the FFS.
(2) Appropriately qualified flight test personnel.
(3) An understanding of the accuracy of the data to be gathered using appropriate alternative data sources, procedures, and instrumentation that is traceable to a recognized standard as described in Attachment 2, Table C2D of this appendix.
(4) Appropriate and sufficient data acquisition equipment or system(s), including appropriate data reduction and analysis methods and techniques, acceptable to the FAA's Aircraft Certification Service.
b. The data, regardless of source, must be presented:
(1) In a format that supports the FFS validation process;
(2) In a manner that is clearly readable and annotated correctly and completely;
(3) With resolution sufficient to determine compliance with the tolerances set forth in Attachment 2, Table C2A of this appendix.
(4) With any necessary instructions or other details provided, such as Stability Augmentation System (SAS) or throttle position; and
(5) Without alteration, adjustments, or bias. Data may be corrected to address known data calibration errors provided that an explanation of the methods used to correct the errors appears in the QTG. The corrected data may be re-scaled, digitized, or otherwise manipulated to fit the desired presentation.
c. After completion of any additional flight test, a flight test report must be submitted in support of the validation data. The report must contain sufficient data and rationale to support qualification of the FFS at the level requested.
d. As required by § 60.13(f), the sponsor must notify the NSPM when it becomes aware that an addition to, an amendment to, or a revision of data that may relate to FFS performance or handling characteristics is available. The data referred to in this paragraph is data used to validate the performance, handling qualities, or other characteristics of the aircraft, including data related to any relevant changes occurring after the type certificate was issued. The sponsor must—
(1) Within 10 calendar days, notify the NSPM of the existence of this data; and
(2) Within 45 calendar days, notify the NSPM of—
(a) The schedule to incorporate this data into the FFS; or
(b) The reason for not incorporating this data into the FFS.
e. In those cases where the objective test results authorize a “snapshot test” or a “series of snapshot test results” in lieu of a time-history result, the sponsor or other data provider must ensure that a steady state condition exists at the instant of time captured by the “snapshot.” The steady state condition must exist from 4 seconds prior to, through 1 second following, the instant of time captured by the snap shot.
End QPS Requirements
Begin Information
f. The FFS sponsor is encouraged to maintain a liaison with the manufacturer of the aircraft being simulated (or with the holder of the aircraft type certificate for the aircraft being simulated if the manufacturer is no longer in business), and, if appropriate, with the person who supplied the aircraft data package for the FFS in order to facilitate the notification required by § 60.13(f).
g. It is the intent of the NSPM that for new aircraft entering service, at a point well in advance of preparation of the QTG, the sponsor should submit to the NSPM for approval, a descriptive document (see Table C2D, Sample Validation Data Roadmap for Helicopters) containing the plan for acquiring the validation data, including data sources. This document should clearly identify sources of data for all required tests, a description of the validity of these data for a specific engine type and thrust rating configuration, and the revision levels of all avionics affecting the performance or flying qualities of the aircraft. Additionally, this document should provide other information, such as the rationale or explanation for cases where data or data parameters are missing, instances where engineering simulation data are used or where flight test methods require further explanations. It should also provide a brief narrative describing the cause and effect of any deviation from data requirements. The aircraft manufacturer may provide this document.
h. There is no requirement for any flight test data supplier to submit a flight test plan or program prior to gathering flight test data. However, the NSPM notes that inexperienced data gatherers often provide data that is irrelevant, improperly marked, or lacking adequate justification for selection. Other problems include inadequate information regarding initial conditions or test maneuvers. The NSPM has been forced to refuse these data submissions as validation data for an FFS evaluation. It is for this reason that the NSPM recommends that any data supplier not previously experienced in this area review the data necessary for programming and for validating the performance of the FFS, and discuss the flight test plan anticipated for acquiring such data with the NSPM well in advance of commencing the flight tests.
i. The NSPM will consider, on a case-by-case basis, whether to approve supplemental validation data derived from flight data recording systems such as a Quick Access Recorder or Flight Data Recorder.
End Information
10. Special Equipment and Personnel Requirements for Qualification of the FFS (§ 60.14)
Begin Information
a. In the event that the NSPM determines that special equipment or specifically qualified persons will be required to conduct an evaluation, the NSPM will make every attempt to notify the sponsor at least one (1) week, but in no case less than 72 hours, in advance of the evaluation. Examples of special equipment include spot photometers, flight control measurement devices, and sound analyzers. Examples of specially qualified personnel include individuals specifically qualified to install or use any special equipment when its use is required.
b. Examples of a special evaluation include an evaluation conducted after an FFS is moved, at the request of the TPAA, or as a result of comments received from users of the FFS that raise questions about the continued qualification or use of the FFS.
End Information
11. Initial (and Upgrade) Qualification Requirements (§ 60.15)
Begin QPS Requirements
a. In order to be qualified at a particular qualification level, the FFS must:
(1) Meet the general requirements listed in Attachment 1 of this appendix;
(2) Meet the objective testing requirements listed in Attachment 2 of this appendix; and
(3) Satisfactorily accomplish the subjective tests listed in Attachment 3 of this appendix.
b. The request described in § 60.15(a) must include all of the following:
(1) A statement that the FFS meets all of the applicable provisions of this part and all applicable provisions of the QPS.
(2) A confirmation that the sponsor will forward to the NSPM the statement described in § 60.15(b) in such time as to be received no later than 5 business days prior to the scheduled evaluation and may be forwarded to the NSPM via traditional or electronic means.
(3) A QTG, acceptable to the NSPM, that includes all of the following:
(a) Objective data obtained from aircraft testing or another approved source.
(b) Correlating objective test results obtained from the performance of the FFS as prescribed in the appropriate QPS.
(c) The result of FFS subjective tests prescribed in the appropriate QPS.
(d) A description of the equipment necessary to perform the evaluation for initial qualification and the continuing qualification evaluations.
c. The QTG described in paragraph (a)(3) of this section, must provide the documented proof of compliance with the simulator objective tests in Attachment 2, Table C2A of this appendix.
d. The QTG is prepared and submitted by the sponsor, or the sponsor's agent on behalf of the sponsor, to the NSPM for review and approval, and must include, for each objective test:
(1) Parameters, tolerances, and flight conditions.
(2) Pertinent and complete instructions for the conduct of automatic and manual tests.
(3) A means of comparing the FFS test results to the objective data.
(4) Any other information as necessary, to assist in the evaluation of the test results.
(5) Other information appropriate to the qualification level of the FFS.
e. The QTG described in paragraphs (a)(3) and (b) of this section, must include the following:
(1) A QTG cover page with sponsor and FAA approval signature blocks (see Attachment 4, Figure C4C, of this appendix, for a sample QTG cover page).
(2) A continuing qualification evaluation schedule requirements page. This page will be used by the NSPM to establish and record the frequency with which continuing qualification evaluations must be conducted and any subsequent changes that may be determined by the NSPM in accordance with § 60.19. See Attachment 4 of this appendix, Figure C4G, for a sample Continuing Qualification Evaluation Requirements page.
(3) An FFS information page that provides the information listed in this paragraph (see Attachment 4, Figure C4B, of this appendix for a sample FFS information page). For convertible FFSs, the sponsor must submit a separate page for each configuration of the FFS.
(a) The sponsor's FFS identification number or code.
(b) The helicopter model and series being simulated.
(c) The aerodynamic data revision number or reference.
(d) The source of the basic aerodynamic model and the aerodynamic coefficient data used to modify the basic model.
(e) The engine model(s) and its data revision number or reference.
(f) The flight control data revision number or reference.
(g) The flight management system identification and revision level.
(h) The FFS model and manufacturer.
(i) The date of FFS manufacture.
(j) The FFS computer identification.
(k) The visual system model and manufacturer, including display type.
(l) The motion system type and manufacturer, including degrees of freedom.
(4) A Table of Contents.
(5) A log of revisions and a list of effective pages.
(6) List of all relevant data references.
(7) A glossary of terms and symbols used (including sign conventions and units).
(8) Statements of compliance and capability (SOCs) with certain requirements.
(9) Recording procedures or equipment required to accomplish the objective tests.
(10) The following information for each objective test designated in Attachment 2 of this appendix, Table C2A, as applicable to the qualification level sought:
(a) Name of the test.
(b) Objective of the test.
(c) Initial conditions.
(d) Manual test procedures.
(e) Automatic test procedures (if applicable).
(f) Method for evaluating FFS objective test results.
(g) List of all relevant parameters driven or constrained during the automatically conducted test(s).
(h) List of all relevant parameters driven or constrained during the manually conducted test(s).
(i) Tolerances for relevant parameters.
(j) Source of Validation Data (document and page number).
(k) Copy of the Validation Data (if located in a separate binder, a cross reference for the identification and page number for pertinent data location must be provided).
(l) Simulator Objective Test Results as obtained by the sponsor. Each test result must reflect the date completed and must be clearly labeled as a product of the device being tested.
f. A convertible FFS is addressed as a separate FFS for each model and series helicopter to which it will be converted and for the FAA qualification level sought. If a sponsor seeks qualification for two or more models of a helicopter type using a convertible FFS, the sponsor must submit a QTG for each helicopter model, or a QTG for the first helicopter model and a supplement to that QTG for each additional helicopter model. The NSPM will conduct evaluations for each helicopter model.
g. Form and manner of presentation of objective test results in the QTG:
(1) The sponsor's FFS test results must be recorded in a manner acceptable to the NSPM, that allows easy comparison of the FFS test results to the validation data (e.g., use of a multi-channel recorder, line printer, cross plotting, overlays, transparencies).
(2) FFS results must be labeled using terminology common to helicopter parameters as opposed to computer software identifications.
(3) Validation data documents included in a QTG may be photographically reduced only if such reduction will not alter the graphic scaling or cause difficulties in scale interpretation or resolution.
(4) Scaling on graphical presentations must provide the resolution necessary to evaluate the parameters shown in Attachment 2, Table C2A of this appendix.
(5) Tests involving time histories, data sheets (or transparencies thereof) and FFS test results must be clearly marked with appropriate reference points to ensure an accurate comparison between the FFS and the helicopter with respect to time. Time histories recorded via a line printer are to be clearly identified for cross plotting on the helicopter data. Over-plots must not obscure the reference data.
h. The sponsor may elect to complete the QTG objective and subjective tests at the manufacturer's facility or at the sponsor's training facility. If the tests are conducted at the manufacturer's facility, the sponsor must repeat at least one-third of the tests at the sponsor's training facility in order to substantiate FFS performance. The QTG must be clearly annotated to indicate when and where each test was accomplished. Tests conducted at the manufacturer's facility and at the sponsor's training facility must be conducted after the FFS is assembled with systems and sub-systems functional and operating in an interactive manner. The test results must be submitted to the NSPM.
i. The sponsor must maintain a copy of the MQTG at the FFS location.
j. All FFSs for which the initial qualification is conducted after May 30, 2014, must have an electronic MQTG (eMQTG) including all objective data obtained from helicopter testing, or another approved source (reformatted or digitized), together with correlating objective test results obtained from the performance of the FFS (reformatted or digitized) as prescribed in this appendix. The eMQTG must also contain the general FFS performance or demonstration results (reformatted or digitized) prescribed in this appendix, and a description of the equipment necessary to perform the initial qualification evaluation and the continuing qualification evaluations. The eMQTG must include the original validation data used to validate FFS performance and handling qualities in either the original digitized format from the data supplier or an electronic scan of the original time-history plots that were provided by the data supplier. A copy of the eMQTG must be provided to the NSPM.
k. All other FFSs not covered in subparagraph “j” must have an electronic copy of the MQTG by May 30, 2014. An electronic copy of the MQTG must be provided to the NSPM. This may be provided by an electronic scan presented in a Portable Document File (PDF), or similar format acceptable to the NSPM.
l. During the initial (or upgrade) qualification evaluation conducted by the NSPM, the sponsor must also provide a person who is a user of the device (e.g., a qualified pilot or instructor pilot with flight time experience in that aircraft) and knowledgeable about the operation of the aircraft and the operation of the FFS.
End QPS Requirements
Begin Information
m. Only those FFSs that are sponsored by a certificate holder as defined in Appendix F of this part will be evaluated by the NSPM. However, other FFS evaluations may be conducted on a case-by-case basis as the Administrator deems appropriate, but only in accordance with applicable agreements.
n. The NSPM will conduct an evaluation for each configuration, and each FFS must be evaluated as completely as possible. To ensure a thorough and uniform evaluation, each FFS is subjected to the general simulator requirements in Attachment 1 of this appendix, the objective tests listed in Attachment 2 of this appendix, and the subjective tests listed in Attachment 3 of this appendix. The evaluations described herein will include, but not necessarily be limited to the following:
(1) Helicopter responses, including longitudinal and lateral-directional control responses (see Attachment 2 of this appendix).
(2) Performance in authorized portions of the simulated helicopter's operating envelope, to include tasks evaluated by the NSPM in the areas of surface operations, takeoff, climb, cruise, descent, approach, and landing as well as abnormal and emergency operations (see Attachment 2 of this appendix).
(3) Control checks (see Attachment 1 and Attachment 2 of this appendix).
(4) Flight deck configuration (see Attachment 1 of this appendix).
(5) Pilot, flight engineer, and instructor station functions checks (see Attachment 1 and Attachment 3 of this appendix).
(6) Helicopter systems and sub-systems (as appropriate) as compared to the helicopter simulated (see Attachment 1 and Attachment 3 of this appendix).
(7) FFS systems and sub-systems, including force cueing (motion), visual, and aural (sound) systems, as appropriate (see Attachment 1 and Attachment 2 of this appendix).
(8) Certain additional requirements, depending upon the qualification level sought, including equipment or circumstances that may become hazardous to the occupants. The sponsor may be subject to Occupational Safety and Health Administration requirements.
o. The NSPM administers the objective and subjective tests, which includes an examination of functions. The tests include a qualitative assessment of the FFS by an NSP pilot. The NSP evaluation team leader may assign other qualified personnel to assist in accomplishing the functions examination and/or the objective and subjective tests performed during an evaluation when required.
(1) Objective tests provide a basis for measuring and evaluating FFS performance and determining compliance with the requirements of this part.
(2) Subjective tests provide a basis for:
(a) Evaluating the capability of the FFS to perform over a typical utilization period;
(b) Determining that the FFS satisfactorily simulates each required task;
(c) Verifying correct operation of the FFS controls, instruments, and systems; and
(d) Demonstrating compliance with the requirements of this part.
p. The tolerances for the test parameters listed in Attachment 2 of this appendix reflect the range of tolerances acceptable to the NSPM for FFS validation and are not to be confused with design tolerances specified for FFS manufacture. In making decisions regarding tests and test results, the NSPM relies on the use of operational and engineering judgment in the application of data (including consideration of the way in which the flight test was flown and way the data was gathered and applied), data presentations, and the applicable tolerances for each test.
q. In addition to the scheduled continuing qualification evaluation, each FFS is subject to evaluations conducted by the NSPM at any time without prior notification to the sponsor. Such evaluations would be accomplished in a normal manner (i.e., requiring exclusive use of the FFS for the conduct of objective and subjective tests and an examination of functions) if the FFS is not being used for flight crewmember training, testing, or checking. However, if the FFS were being used, the evaluation would be conducted in a non-exclusive manner. This non-exclusive evaluation will be conducted by the FFS evaluator accompanying the check airman, instructor, Aircrew Program Designee (APD), or FAA inspector aboard the FFS along with the student(s) and observing the operation of the FFS during the training, testing, or checking activities.
r. Problems with objective test results are handled as follows:
(1) If a problem with an objective test result is detected by the NSP evaluation team during an evaluation, the test may be repeated or the QTG may be amended.
(2) If it is determined that the results of an objective test do not support the level requested but do support a lower level, the NSPM may qualify the FFS at that lower level. For example, if a Level D evaluation is requested and the FFS fails to meet sound test tolerances, it could be qualified at Level C.
s. After an FFS is successfully evaluated, the NSPM issues a certificate of qualification (COQ) to the sponsor. The NSPM recommends the FFS to the TPAA, who will approve the FFS for use in a flight training program. The COQ will be issued at the satisfactory conclusion of the initial or continuing qualification evaluation and will list the tasks for which the FFS is qualified, referencing the tasks described in Table C1B in Attachment 1 of this appendix. However, it is the sponsor's responsibility to obtain TPAA approval prior to using the FFS in an FAA-approved flight training program.
t. Under normal circumstances, the NSPM establishes a date for the initial or upgrade evaluation within ten (10) working days after determining that a complete QTG is acceptable. Unusual circumstances may warrant establishing an evaluation date before this determination is made. A sponsor may schedule an evaluation date as early as 6 months in advance. However, there may be a delay of 45 days or more in rescheduling and completing the evaluation if the sponsor is unable to meet the scheduled date. See Attachment 4, of this appendix, Figure C4A, Sample Request for Initial, Upgrade, or Reinstatement Evaluation.
u. The numbering system used for objective test results in the QTG should closely follow the numbering system set out in Attachment 2, FFS Objective Tests, Table C2A of this appendix.
v. Contact the NSPM or visit the NSPM Web site for additional information regarding the preferred qualifications of pilots used to meet the requirements of § 60.15(d).
w. Examples of the exclusions for which the FFS might not have been subjectively tested by the sponsor or the NSPM and for which qualification might not be sought or granted, as described in § 60.15(g)(6), include takeoffs and landing from slopes and pinnacles.
End Information
12. Additional Qualifications for a Currently Qualified FFS (§ 60.16)
No additional regulatory or informational material applies to § 60.16, Additional Qualifications for a Currently Qualified FFS.
13. Previously Qualified FFSs (§ 60.17)
Begin QPS Requirements
a. In instances where a sponsor plans to remove an FFS from active status for a period of less than two years, the following procedures apply:
(1) The NSPM must be notified in writing and the notification must include an estimate of the period that the FFS will be inactive.
(2) Continuing Qualification evaluations will not be scheduled during the inactive period.
(3) The NSPM will remove the FFS from the list of qualified FSTDs on a mutually established date not later than the date on which the first missed continuing qualification evaluation would have been scheduled.
(4) Before the FFS is restored to qualified status, it must be evaluated by the NSPM. The evaluation content and the time required to accomplish the evaluation is based on the number of continuing qualification evaluations and sponsor-conducted quarterly inspections missed during the period of inactivity.
(5) The sponsor must notify the NSPM of any changes to the original scheduled time out of service.
b. Simulators qualified prior to May 30, 2008, are not required to meet the general simulation requirements, the objective test requirements, and the subjective test requirements of attachments 1, 2, and 3, of this appendix as long as the simulator continues to meet the test requirements contained in the MQTG developed under the original qualification basis.
c. After May 30, 2009, each visual scene or airport model beyond the minimum required for the FFS qualification level that is installed in and available for use in a qualified FFS must meet the requirements described in Attachment 3 of this appendix.
d. Simulators qualified prior to May 30, 2008, may be updated. If an evaluation is deemed appropriate or necessary by the NSPM after such an update, the evaluation will not require an evaluation to standards beyond those against which the simulator was originally qualified.
End QPS Requirements
Begin Information
e. Other certificate holders or persons desiring to use an FFS may contract with FFS sponsors to use FFSs previously qualified at a particular level for a helicopter type and approved for use within an FAA-approved flight training program. Such FFSs are not required to undergo an additional qualification process, except as described in § 60.16.
f. Each FFS user must obtain approval from the appropriate TPAA to use any FFS in an FAA-approved flight training program.
g. The intent of the requirement listed in § 60.17(b), for each FFS to have an SOQ within 6 years, is to have the availability of that statement (including the configuration list and the limitations to authorizations) to provide a complete picture of the FFS inventory regulated by the FAA. The issuance of the statement will not require any additional evaluation or require any adjustment to the evaluation basis for the FFS.
h. Downgrading of an FFS is a permanent change in qualification level and will necessitate the issuance of a revised SOQ to reflect the revised qualification level, as appropriate. If a temporary restriction is placed on an FFS because of a missing, malfunctioning, or inoperative component or on-going repairs, the restriction is not a permanent change in qualification level. Instead, the restriction is temporary and is removed when the reason for the restriction has been resolved.
i. The NSPM will determine the evaluation criteria for an FFS that has been removed from active status. The criteria will be based on the number of continuing qualification evaluations and quarterly inspections missed during the period of inactivity. For example, if the FFS were out of service for a 1 year period, it would be necessary to complete the entire QTG, since all of the quarterly evaluations would have been missed. The NSPM will also consider how the FFS was stored, whether parts were removed from the FFS and whether the FFS was disassembled.
j. The FFS will normally be requalified using the FAA-approved MQTG and the criteria that was in effect prior to its removal from qualification. However, inactive periods of 2 years or more will require requalification under the standards in effect and current at the time of requalification.
End Information
14. Inspection, Continuing Qualification Evaluation, and Maintenance Requirements (§ 60.19)
Begin QPS Requirements
a. The sponsor must conduct a minimum of four evenly spaced inspections throughout the year. The objective test sequence and content of each inspection must be developed by the sponsor and must be acceptable to the NSPM.
b. The description of the functional preflight check must be contained in the sponsor's QMS.
c. Record “functional preflight” in the FFS discrepancy log book or other acceptable location, including any item found to be missing, malfunctioning, or inoperative.
d. During the continuing qualification evaluation conducted by the NSPM, the sponsor must also provide a person knowledgeable about the operation of the aircraft and the operation of the FFS.
e. The NSPM will conduct continuing qualification evaluations every 12 months unless:
(1) The NSPM becomes aware of discrepancies or performance problems with the device that warrants more frequent evaluations; or
(2) The sponsor implements a QMS that justifies less frequent evaluations. However, in no case shall the frequency of a continuing qualification evaluation exceed 36 months.
End QPS Requirements
Begin Information
f. The sponsor's test sequence and the content of each quarterly inspection required in § 60.19(a)(1) should include a balance and a mix from the objective test requirement areas listed as follows:
(1) Performance.
(2) Handling qualities.
(3) Motion system (where appropriate).
(4) Visual system (where appropriate).
(5) Sound system (where appropriate).
(6) Other FFS systems.
g. If the NSP evaluator plans to accomplish specific tests during a normal continuing qualification evaluation that requires the use of special equipment or technicians, the sponsor will be notified as far in advance of the evaluation as practical; but not less than 72 hours. Examples of such tests include latencies, control dynamics, sounds and vibrations, motion, and/or some visual system tests.
h. The continuing qualification evaluations, described in § 60.19(b), will normally require 4 hours of FFS time. However, flexibility is necessary to address abnormal situations or situations involving aircraft with additional levels of complexity (e.g., computer controlled aircraft). The sponsor should anticipate that some tests may require additional time. The continuing qualification evaluations will consist of the following:
(1) Review of the results of the quarterly inspections conducted by the sponsor since the last scheduled continuing qualification evaluation.
(2) A selection of approximately 8 to 15 objective tests from the MQTG that provide an adequate opportunity to evaluate the performance of the FFS. The tests chosen will be performed either automatically or manually and should be able to be conducted within approximately one-third (1/3) of the allotted FFS time.
(3) A subjective evaluation of the FFS to perform a representative sampling of the tasks set out in attachment 3 of this appendix. This portion of the evaluation should take approximately two-thirds (2/3) of the allotted FFS time.
(4) An examination of the functions of the FFS may include the motion system, visual system, sound system, instructor operating station, and the normal functions and simulated malfunctions of the simulated helicopter systems. This examination is normally accomplished simultaneously with the subjective evaluation requirements.
End Information
15. Logging FFS Discrepancies (§ 60.20)
Begin Information
No additional regulatory or informational material applies to § 60.20. Logging FFS Discrepancies.
End Information
16. Interim Qualification of FFSs for New Helicopter Types or Models (§ 60.21)
Begin Information
No additional regulatory or informational material applies to § 60.21, Interim Qualification of FFSs for New Helicopter Types or Models.
End Information
17. Modifications to FFSs (§ 60.23)
Begin QPS Requirements
a. The notification described in § 60.23(c)(2) must include a complete description of the planned modification, with a description of the operational and engineering effect the proposed modification will have on the operation of the FFS and the results that are expected with the modification incorporated.
b. Prior to using the modified FFS:
(1) All the applicable objective tests completed with the modification incorporated, including any necessary updates to the MQTG (e.g., accomplishment of FSTD Directives) must be acceptable to the NSPM; and
(2) The sponsor must provide the NSPM with a statement signed by the MR that the factors listed in § 60.15(b) are addressed by the appropriate personnel as described in that section.
End QPS Requirements
Begin Information
(3) FSTD Directives are considered modifications of an FFS. See Attachment 4 of this appendix for a sample index of effective FSTD Directives. See Attachment 6 of this appendix for a list of all effective FSTD Directives applicable to Helicopter FFSs.
End Information
18. Operation with Missing, Malfunctioning, or Inoperative Components (§ 60.25)
Begin Information
a. The sponsor's responsibility with respect to § 60.25(a) is satisfied when the sponsor fairly and accurately advises the user of the current status of an FFS, including any missing, malfunctioning, or inoperative (MMI) component(s).
b. It is the responsibility of the instructor, check airman, or representative of the administrator conducting training, testing, or checking to exercise reasonable and prudent judgment to determine if any MMI component is necessary for the satisfactory completion of a specific maneuver, procedure, or task.
c. If the 29th or 30th day of the 30-day period described in § 60.25(b) is on a Saturday, a Sunday, or a holiday, the FAA will extend the deadline until the next business day.
d. In accordance with the authorization described in § 60.25(b), the sponsor may develop a discrepancy prioritizing system to accomplish repairs based on the level of impact on the capability of the FFS. Repairs having a larger impact on FFS capability to provide the required training, evaluation, or flight experience will have a higher priority for repair or replacement.
End Information
19. Automatic Loss of Qualification and Procedures for Restoration of Qualification (§ 60.27)
Begin Information
If the sponsor provides a plan for how the FFS will be maintained during its out-of-service period (e.g., periodic exercise of mechanical, hydraulic, and electrical systems; routine replacement of hydraulic fluid; control of the environmental factors in which the FFS is to be maintained) there is a greater likelihood that the NSPM will be able to determine the amount of testing required for requalification.
End Information
20. Other Losses of Qualification and Procedures for Restoration of Qualification (§ 60.29)
Begin Information
If the sponsor provides a plan for how the FFS will be maintained during its out-of-service period (e.g., periodic exercise of mechanical, hydraulic, and electrical systems; routine replacement of hydraulic fluid; control of the environmental factors in which the FFS is to be maintained) there is a greater likelihood that the NSPM will be able to determine the amount of testing required for requalification.
End Information
21. Record Keeping and Reporting (§ 60.31)
Begin QPS Requirements
a. FFS modifications can include hardware or software changes. For FFS modifications involving software programming changes, the record required by § 60.31(a)(2) must consist of the name of the aircraft system software, aerodynamic model, or engine model change, the date of the change, a summary of the change, and the reason for the change.
b. If a coded form for record keeping is used, it must provide for the preservation and retrieval of information with appropriate security or controls to prevent the inappropriate alteration of such records after the fact.
End QPS Requirements
22. Applications, Logbooks, Reports, and Records: Fraud, Falsification, or Incorrect Statements (§ 60.33)
Begin Information
No additional regulatory or informational material applies to § 60.33, Applications, Logbooks, Reports, and Records: Fraud, Falsification, or Incorrect Statements.
23. [Reserved]
24. [Reserved]
25. FFS Qualification on the Basis of a Bilateral Aviation Safety Agreement (BASA) (§ 60.37)
No additional regulatory or informational material applies to § 60.37, FFS Qualification on the Basis of a Bilateral Aviation Safety Agreement (BASA).
End Information
Attachment 1 to Appendix C to Part 60—GENERAL SIMULATOR REQUIREMENTS
Begin QPS Requirements
1. Requirements
a. Certain requirements included in this appendix must be supported with an SOC as defined in Appendix F of this part, which may include objective and subjective tests. The requirements for SOCs are indicated in the “General Simulator Requirements” column in Table C1A of this appendix.
b. Table C1A describes the requirements for the indicated level of FFS. Many devices include operational systems or functions that exceed the requirements outlined in this section. However, all systems will be tested and evaluated in accordance with this appendix to ensure proper operation.
End QPS Requirements
Begin Information
2. Discussion
a. This attachment describes the general simulator requirements for qualifying a helicopter FFS. The sponsor should also consult the objective tests in Attachment 2 of this appendix and the examination of functions and subjective tests listed in Attachment 3 of this appendix to determine the complete requirements for a specific level simulator.
b. The material contained in this attachment is divided into the following categories:
(1) General flight deck configuration.
(2) Simulator programming.
(3) Equipment operation.
(4) Equipment and facilities for instructor/evaluator functions.
(5) Motion system.
(6) Visual system.
(7) Sound system.
c. Table C1A provides the standards for the General Simulator Requirements.
d. Table C1B provides the tasks that the sponsor will examine to determine whether the FFS satisfactorily meets the requirements for flight crew training, testing, and experience, and provides the tasks for which the simulator may be qualified.
e. Table C1C provides the functions that an instructor/check airman must be able to control in the simulator.
f. It is not required that all of the tasks that appear on the List of Qualified Tasks (part of the SOQ) be accomplished during the initial or continuing qualification evaluation.
g. Table C1A addresses only Levels B, C, and D helicopter simulators because there are no Level A Helicopter simulators.
End Information
Table C1A—Minimum Simulator Requirements
Entry No. | QPS requirements | Simulator levels | Information | ||
|---|---|---|---|---|---|
General simulator requirements | B | C | D | Notes | |
1. | General Flight Deck Configuration | ||||
1.a. | The simulator must have a flight deck that is a replica of the helicopter being simulatedThe simulator must have controls, equipment, observable flight deck indicators, circuit breakers, and bulkheads properly located, functionally accurate and replicating the helicopter. The direction of movement of controls and switches must be identical to that in the helicopter. Pilot seats must afford the capability for the occupant to be able to achieve the design “eye position” established for the helicopter being simulated. Equipment for the operation of the flight deck windows must be included, but the actual windows need not be operable. Fire axes, extinguishers, and spare light bulbs must be available in the FFS but may be relocated to a suitable location as near as practical to the original position. Fire axes, landing gear pins, and any similar purpose instruments need only be represented in silhouette | X | X | X | For simulator purposes, the flight deck consists of all that space forward of a cross section of the fuselage at the most extreme aft setting of the pilots' seats including additional, required flight crewmember duty stations and those required bulkheads aft of the pilot seats. For clarification, bulkheads containing only items such as landing gear pin storage compartments, fire axes and extinguishers, spare light bulbs, and aircraft documents pouches are not considered essential and may be omitted. |
1.b. | Those circuit breakers that affect procedures or result in observable flight deck indications must be properly located and functionally accurate | X | X | X | |
2. | Programming | ||||
2.a. | A flight dynamics model that accounts for various combinations of air speed and power normally encountered in flight must correspond to actual flight conditions, including the effect of change in helicopter attitude, aerodynamic and propulsive forces and moments, altitude, temperature, mass, center of gravity location, and configurationAn SOC is required | X | X | X | |
2.b. | The simulator must have the computer capacity, accuracy, resolution, and dynamic response needed to meet the qualification level soughtAn SOC is required | X | X | X | |
2.c. | Ground handling (where appropriate) and aerodynamic programming must include the following: | ||||
2.c.1. | Ground effectLevel B does not require hover programming An SOC is required | X | X | X | Applicable areas include flare and touch down from a running landing as well as for in-ground-effect (IGE) hover. A reasonable simulation of ground effect includes modeling of lift, drag, pitching moment, trim, and power while in ground effect. |
2.c.2. | Ground reactionLevel B does not require hover programming An SOC is required | X | X | X | Reaction of the helicopter upon contact with the landing surface during landing (e.g., strut deflection, tire or skid friction, side forces) may differ with changes in gross weight, airspeed, rate of descent on touchdown, and slide slip. |
2.d. | The simulator must provide for manual and automatic testing of simulator hardware and software programming to determine compliance with simulator objective tests as prescribed in Attachment 2 of this appendix An SOC is required | X | X | This may include an automated system, which could be used for conducting at least a portion of the QTG tests. Automatic “flagging” of out-of-tolerance situations is encouraged. | |
2.e. | The relative responses of the motion system, visual system, and flight deck instruments must be measured by latency tests or transport delay tests. Motion onset must occur before the end of the scan of that video field. Instrument response may not occur prior to motion onset. Test results must be within the following limits: | The intent is to verify that the simulator provides instrument, motion, and visual cues that are like the helicopter responses within the stated time delays. It is preferable motion onset occur before the start of the visual scene change (the start of the scan of the first video field containing different information). For helicopter response, acceleration in the appropriate corresponding rotational axis is preferred. | |||
2.e.1. | Response must be within 150 milliseconds of the helicopter response | X | |||
2.e.2. | Response must be within 100 milliseconds of the helicopter response | X | X | ||
2.f. | The simulator must simulate brake and tire failure dynamics (including antiskid failure, if appropriate)An SOC is required. | X | X | The simulator should represent the motion (in the appropriate axes) and the directional control characteristics of the helicopter when experiencing simulated brake or tire failures. | |
2.g. | The aerodynamic modeling in the simulator must include:(1) Ground effect, (2) Effects of airframe and rotor icing (if applicable), (3) Aerodynamic interference effects between the rotor wake and fuselage, (4) Influence of the rotor on control and stabilization systems, (5) Representations of settling with power, and (6) Retreating blade stall. An SOC is required. | X | X | See Attachment 2 of this appendix for further information on ground effect. | |
2.h. | The simulator must provide for realistic mass properties, including gross weight, center of gravity, and moments of inertia as a function of payload and fuel loadingAn SOC is required. | X | X | X | |
3. | Equipment Operation | ||||
3.a. | All relevant instrument indications involved in the simulation of the helicopter must automatically respond to control movement or external disturbances to the simulated helicopter; e.g., turbulence or windshear. Numerical values must be presented in the appropriate units | X | X | X | |
3.b. | Communications, navigation, caution, and warning equipment must be installed and operate within the tolerances applicable for the helicopter being simulated | X | X | X | See Attachment 3 of this appendix for further information regarding long-range navigation equipment. |
3.c. | Simulated helicopter systems must operate as the helicopter systems operate under normal, abnormal, and emergency operating conditions on the ground and in flight | X | X | X | |
3.d. | The simulator must provide pilot controls with control forces and control travel that correspond to the simulated helicopter. The simulator must also react in the same manner as the helicopter under the same flight conditions | X | X | X | |
3.e. | Simulator control feel dynamics must replicate the helicopter simulated. This must be determined by comparing a recording of the control feel dynamics of the simulator to helicopter measurements. For initial and upgrade evaluations, the control dynamic characteristics must be measured and recorded directly from the flight deck controls, and must be accomplished in takeoff, cruise, and landing conditions and configurations | X | X | ||
4. | Instructor/Evaluator Facilities | ||||
4.a. | In addition to the flight crewmember stations, the simulator must have at least two suitable seats for the instructor/check airman and FAA inspector. These seats must provide adequate vision to the pilot's panel and forward windows. All seats other than flight crew seats need not represent those found in the helicopter but must be adequately secured to the floor and equipped with similar positive restraint devices | X | X | X | The NSPM will consider alternatives to this standard for additional seats based on unique flight deck configurations. |
4.b. | The simulator must have controls that enable the instructor/evaluator to control all required system variables and insert all abnormal or emergency conditions into the simulated helicopter systems as described in the sponsor's FAA-approved training program, or as described in the relevant operating manual as appropriate | X | X | X | |
4.c. | The simulator must have instructor controls for all environmental effects expected to be available at the IOS; e.g., clouds, visibility, icing, precipitation, temperature, storm cells, and wind speed and direction | X | X | X | |
4.d. | The simulator must provide the instructor or evaluator the ability to present ground and air hazards | X | X | For example, another aircraft crossing the active runway and converging airborne traffic. | |
4.e. | The simulator must provide the instructor or evaluator the ability to present the effect of re-circulating dust, water vapor, or snow conditions that develop as a result of rotor downwash | X | X | This is a selectable condition that is not required for all operations on or near the surface. | |
5. | Motion System | ||||
5.a. | The simulator must have motion (force) cues perceptible to the pilot that are representative of the motion in a helicopter | X | X | X | For example, touchdown cues should be a function of the rate of descent (RoD) of the simulated helicopter. |
5.b. | The simulator must have a motion (force cueing) system with a minimum of three degrees of freedom (at least pitch, roll, and heave)An SOC is required. | X | |||
5.c. | The simulator must have a motion (force cueing) system that produces cues at least equivalent to those of a six-degrees-of-freedom, synergistic platform motion system (i.e., pitch, roll, yaw, heave, sway, and surge) An SOC is required. | X | X | ||
5.d. | The simulator must provide for the recording of the motion system response time An SOC is required. | X | X | X | |
5.e. | The simulator must provide motion effects programming to include the following: | ||||
(1) Runway rumble, oleo deflections, effects of ground speed, uneven runway, characteristics. | X | X | X | ||
(2) Buffets due to transverse flow effects. | |||||
(3) Buffet during extension and retraction of landing gear. | |||||
(4) Buffet due to retreating blade stall. | |||||
(5) Buffet due to vortex ring (settling with power). | |||||
(6) Representative cues resulting from touchdown. | |||||
(7) High speed rotor vibrations. | |||||
(8) Tire failure dynamics | X | X | |||
(9) Engine malfunction and engine damage | |||||
(10) Airframe ground strike | |||||
(11) Motion vibrations that result from atmospheric disturbances | X | For air turbulence, general purpose disturbance models are acceptable if, when used, they produce test results that approximate demonstrable flight test data. | |||
5.f. | The simulator must provide characteristic motion vibrations that result from operation of the helicopter (for example, retreating blade stall, extended landing gear, settling with power) in so far as vibration marks an event or helicopter state, which can be sensed in the flight deck | X | The simulator should be programmed and instrumented in such a manner that the characteristic buffet modes can be measured and compared to helicopter data. | ||
6. | Visual System | Additional horizontal field-of-view capability may be added at the sponsor's discretion provided the minimum field-of-view is retained. | |||
6.a. | The simulator must have a visual system providing an out-of-the-flight deck view | X | X | X | |
6.b. | The simulator must provide a continuous field-of-view of at least 75° horizontally and 30° vertically per pilot seat. Both pilot seat visual systems must be operable simultaneously. The minimum horizontal field-of-view coverage must be plus and minus one-half (1⁄2) of the minimum continuous field-of-view requirement, centered on the zero degree azimuth line relative to the aircraft fuselage. An SOC must explain the geometry of the installation An SOC is required. | X | |||
6.c. | The simulator must provide a continuous visual field-of-view of at least 146° horizontally and 36° vertically per pilot seat. Both pilot seat visual systems must be operable simultaneously. Horizontal field-of-view is centered on the zero degree azimuth line relative to the aircraft fuselage. The minimum horizontal field-of-view coverage must be plus and minus one-half (1⁄2) of the minimum continuous field-of-view requirement, centered on the zero degree azimuth line relative to the aircraft fuselageAn SOC must explain the geometry of the installation. Capability for a field-of-view in excess of the minimum is not required for qualification at Level C. However, where specific tasks require extended fields of view beyond the 146° by 36° (e.g., to accommodate the use of “chin windows” where the accommodation is either integral with or separate from the primary visual system display), then the extended fields of view must be provided. When considering the installation and use of augmented fields of view, the sponsor must meet with the NSPM to determine the training, testing, checking, and experience tasks for which the augmented field-of-view capability may be required An SOC is required. | X | Optimization of the vertical field-of-view may be considered with respect to the specific helicopter flight deck cut-off angle. The sponsor may request the NSPM to evaluate the FFS for specific authorization(s) for the following:(1) Specific areas within the database needing higher resolution to support landings, take-offs and ground cushion exercises and training away from a heliport, including elevated heliport, helidecks and confined areas. (2) For cross-country flights, sufficient scene details to allow for ground to map navigation over a sector length equal to 30 minutes at an average cruise speed. (3) For offshore airborne radar approaches (ARA), harmonized visual/radar representations of installations. | ||
6.d. | The simulator must provide a continuous visual field-of-view of at least 176° horizontally and 56° vertically per pilot seat. Both pilot seat visual systems must be operable simultaneously. Horizontal field-of-view is centered on the zero degree azimuth line relative to the aircraft fuselage. The minimum horizontal field-of-view coverage must be plus and minus one-half (1⁄2) of the minimum continuous field-of-view requirement, centered on the zero degree azimuth line relative to the aircraft fuselage. An SOC must explain the geometry of the installation. Capability for a field-of-view in excess of the minimum is not required for qualification at Level D. However, where specific tasks require extended fields of view beyond the 176° by 56° (e.g., to accommodate the use of “chin windows” where the accommodation is either integral with or separate from the primary visual system display), then the extended fields of view must be provided. When considering the installation and use of augmented fields of view, the sponsor must meet with the NSPM to determine the training, testing, checking, and experience tasks for which the augmented field-of-view capability may be required An SOC is required. | X | Optimization of the vertical field-of-view may be considered with respect to the specific helicopter flight deck cut-off angle.The sponsor may request the NSPM to evaluate the FFS for specific authorization(s) for the following:(1) Specific areas within the database needing higher resolution to support landings, take-offs and ground cushion exercises and training away from a heliport, including elevated heliport, helidecks and confined areas. (2) For cross-country flights, sufficient scene details to allow for ground to map navigation over a sector length equal to 30 minutes at an average cruise speed. (3) For offshore airborne radar approaches (ARA), harmonized visual/radar representations of installations. | ||
6.e. | The visual system must be free from optical discontinuities and artifacts that create non-realistic cues | X | X | X | Nonrealistic cues might include image “swimming” and image “roll-off,” that may lead a pilot to make incorrect assessments of speed, acceleration and/or situational awareness. |
6.f. | The simulator must have operational landing lights for night scenes.Where used, dusk (or twilight) scenes require operational landing lights. | X | X | X | |
6.g. | The simulator must have instructor controls for the following: (1) Visibility in statute miles (kilometers) and runway visual range (RVR) in ft. (meters). (2) Airport or landing area selection (3) Airport or landing area lighting | X | X | X | |
6.h. | Each airport scene displayed must include the following: (1) Airport runways and taxiways (2) Runway definition (a) Runway surface and markings (b) Lighting for the runway in use, including runway threshold, edge, centerline, touchdown zone, VASI (or PAPI), and approach lighting of appropriate colors, as appropriate (c) Taxiway lights | X | X | X | |
6.i. | The simulator must provide visual system compatibility with dynamic response programming | X | X | X | |
6.j. | The simulator must show that the segment of the ground visible from the simulator flight deck is the same as from the helicopter flight deck (within established tolerances) when at the correct airspeed and altitude above the touchdown zone | X | X | X | This will show the modeling accuracy of the scene with respect to a predetermined position from the end of the runway “in use.” |
6.k. | The simulator must provide visual cues necessary to assess rate of change of height, height AGL, and translational displacement and rates during takeoffs and landings | X | |||
6.l. | The simulator must provide visual cues necessary to assess rate of change of height, height AGL, as well as translational displacement and rates during takeoff, low altitude/low airspeed maneuvering, hover, and landing | X | X | ||
6.m. | The simulator must provide for accurate portrayal of the visual environment relating to the simulator attitude | X | X | X | Visual attitude vs. simulator attitude is a comparison of pitch and roll of the horizon as displayed in the visual scene compared to the display on the attitude indicator. |
6.n | The simulator must provide for quick confirmation of visual system color, RVR, focus, and intensity An SOC is required. | X | X | ||
6.o. | The simulator must be capable of producing at least 10 levels of occulting | X | X | ||
6.p. | Night Visual Scenes. The simulator must provide night visual scenes with sufficient scene content to recognize the airport, the terrain, and major landmarks around the airport. The scene content must allow a pilot to successfully accomplish a visual landing. Night scenes, as a minimum, must provide presentations of sufficient surfaces with appropriate textural cues that include self-illuminated objects such as road networks, ramp lighting, and airport signage, to conduct a visual approach, a landing, and airport movement (taxi). Scenes must include a definable horizon and typical terrain characteristics such as fields, roads and bodies of water and surfaces illuminated by helicopter landing lights | X | X | X | |
6.q. | Dusk (Twilight) Visual Scenes. The simulator must provide dusk (or twilight) visual scenes with sufficient scene content to recognize the airport, the terrain, and major landmarks around the airport. The scene content must allow a pilot to successfully accomplish a visual landing. Dusk (or twilight) scenes, as a minimum, must provide full color presentations of reduced ambient intensity, sufficient surfaces with appropriate textural cues that include self-illuminated objects such as road networks, ramp lighting and airport signage, to conduct a visual approach, landing and airport movement (taxi). Scenes must include a definable horizon and typical terrain characteristics such as fields, roads and bodies of water and surfaces illuminated by representative aircraft lighting (e.g., landing lights). If provided, directional horizon lighting must have correct orientation and be consistent with surface shading effects. Total scene content must be comparable in detail to that produced by 10,000 visible textured surfaces and 15,000 visible lights with sufficient system capacity to display 16 simultaneously moving objects An SOC is required. | X | X | ||
6.r. | Daylight Visual Scenes. The simulator must have daylight visual scenes with sufficient scene content to recognize the airport, the terrain, and major landmarks around the airport. The scene content must allow a pilot to successfully accomplish a visual landing. No ambient lighting may “washout” the displayed visual scene. Total scene content must be comparable in detail to that produced by 10,000 visible textured surfaces and 6,000 visible lights with sufficient system capacity to display 16 simultaneously moving objects. The visual display must be free of apparent and distracting quantization and other distracting visual effects while the simulator is in motion An SOC is required. | X | X | ||
6.s | The simulator must provide operational visual scenes that portray physical relationships known to cause landing illusions to pilots | X | X | For example: short runways, landing approaches over water, uphill or downhill runways, rising terrain on the approach path, unique topographic features. | |
6.t. | The simulator must provide special weather representations of light, medium, and heavy precipitation near a thunderstorm on takeoff and during approach and landing. Representations need only be presented at and below an altitude of 2,000 ft. (610 m) above the airport surface and within 10 miles (16 km) of the airport | X | X | ||
6.u. | The simulator must present visual scenes of wet and snow-covered runways, including runway lighting reflections for wet conditions, and partially obscured lights for snow conditions | X | X | The NSPM will consider suitable alternative effects. | |
6.v. | The simulator must present realistic color and directionality of all airport lighting | X | X | ||
7. | Sound System | ||||
7.a. | The simulator must provide flight deck sounds that result from pilot actions that correspond to those that occur in the helicopter | X | X | X | |
7.b. | Volume control, if installed, must have an indication of the sound level setting | X | X | X | |
7.c. | The simulator must accurately simulate the sound of precipitation, windshield wipers, and other significant helicopter noises perceptible to the pilot during normal and abnormal operations, and include the sound of a crash (when the simulator is landed in an unusual attitude or in excess of the structural gear limitations); normal engine sounds; and the sounds of gear extension and retraction An SOC is required. | X | X | ||
7.d. | The simulator must provide realistic amplitude and frequency of flight deck noises and sounds. Simulator performance must be recorded, compared to amplitude and frequency of the same sounds recorded in the helicopter, and made a part of the QTG | X | |||
Table C1B—Table of Tasks vs. Simulator Level
QPS requirements | Information | ||||
|---|---|---|---|---|---|
Entry No. | Subjective requirementsThe simulator must be able to perform the tasks associated with that level of qualification. | Simulator levels | Notes | ||
B | C | D | |||
1. Preflight Procedures | |||||
1.a. | Preflight Inspection (Flight deck Only) switches, indicators, systems, and equipment | X | X | X | |
1.b. | APU/Engine start and run-up | ||||
1.b.1. | Normal start procedures | X | X | X | |
1.b.2. | Alternate start procedures | X | X | X | |
1.b.3. | Abnormal starts and shutdowns (hot start, hung start) | X | X | X | |
1.c. | Taxiing—Ground | X | X | X | |
1.d. | Taxiing—Hover | X | X | X | |
1.e. | Pre-takeoff Checks | X | X | X | |
2. Takeoff and Departure Phase | |||||
2.a. | Normal takeoff | ||||
2.a.1. | From ground | X | X | X | |
2.a.2. | From hover | X | X | ||
2.a.3. | Running | X | X | X | |
2.b. | Instrument | X | X | X | |
2.c. | Powerplant Failure During Takeoff | X | X | X | |
2.d. | Rejected Takeoff | X | X | X | |
2.e. | Instrument Departure | X | X | X | |
3. Climb | |||||
3.a. | Normal | X | X | X | |
3.b. | Obstacle clearance | X | X | X | |
3.c. | Vertical | X | X | X | |
3.d. | One engine inoperative | X | X | X | |
4. In-flight Maneuvers | |||||
4.a. | Turns (timed, normal, steep) | X | X | X | |
4.b. | Powerplant Failure—Multiengine Helicopters | X | X | X | |
4.c. | Powerplant Failure—Single-Engine Helicopters | X | X | X | |
4.d. | Recovery From Unusual Attitudes | X | X | X | |
4.e. | Settling with Power | X | X | X | |
4.f. | Specific Flight Characteristics incorporated into the user's FAA approved flight training program | A | A | A | |
5. Instrument Procedures | |||||
5.a. | Instrument Arrival | X | X | X | |
5.b. | Holding | X | X | X | |
5.c. | Precision Instrument Approach | ||||
5.c.1. | Normal—All engines operating | X | X | X | |
5.c.2. | Manually controlled—One or more engines inoperative | X | X | X | |
5.d. | Non-precision Instrument Approach | X | X | X | |
5.e. | Missed Approach | ||||
5.e.1. | All engines operating | X | X | X | |
5.e.2. | One or more engines inoperative | X | X | X | |
5.e.3. | Stability augmentation system failure | X | X | X | |
6. Landings and Approaches to Landings | |||||
6.a. | Visual Approaches (normal, steep, shallow) | X | X | X | |
6.b. | Landings | ||||
6.b.1. | Normal/crosswind | ||||
6.b.1.a. | Running | X | X | X | |
6.b.1.b. | From Hover | X | X | ||
6.b.2. | One or more engines inoperative | X | X | X | |
6.b.3. | Rejected Landing | X | X | X | |
7. Normal and Abnormal Procedures | |||||
7.a. | Powerplant | X | X | X | |
7.b. | Fuel System | X | X | X | |
7.c. | Electrical System | X | X | X | |
7.d. | Hydraulic System | X | X | X | |
7.e. | Environmental System(s) | X | X | X | |
7.f. | Fire Detection and Extinguisher Systems | X | X | X | |
7.g. | Navigation and Aviation Systems | X | X | X | |
7.h. | Automatic Flight Control System, Electronic Flight Instrument System, and Related Subsystems | X | X | X | |
7.i. | Flight Control Systems | X | X | X | |
7.j. | Anti-ice and Deice Systems | X | X | X | |
7.k. | Aircraft and Personal Emergency Equipment | X | X | X | |
7.l. | Special Missions tasks (e.g., Night Vision goggles, Forward Looking Infrared System, External Loads and as listed on the SOQ) | A | A | X | |
8. Emergency procedures (as applicable) | |||||
8.a. | Emergency Descent | X | X | X | |
8.b. | Inflight Fire and Smoke Removal | X | X | X | |
8.c. | Emergency Evacuation | X | X | X | |
8.d. | Ditching | X | X | X | |
8.e. | Autorotative Landing | X | X | X | |
8.f. | Retreating blade stall recovery | X | X | X | |
8.g. | Mast bumping | X | X | X | |
8.h. | Loss of tail rotor effectiveness | X | X | X | |
8.i. | Vortex recovery | X | X | X | |
9. Postflight Procedures | |||||
9.a | After-Landing Procedures | X | X | X | |
9.b. | Parking and Securing | ||||
9.b.1. | Rotor brake operation | X | X | X | |
9.b.2. | Abnormal/emergency procedures | X | X | X | |
Note: An “A” in the table indicates that the system, task, or procedure may be examined if the appropriate aircraft system or control is simulated in the FFS and is working properly | |||||
Table C1C—Table of Tasks vs. Simulator Level
QPS requirements | Information | ||||
|---|---|---|---|---|---|
Entry No. | Subjective requirementsThe simulator must be able to perform the tasks associated with that level of qualification. | Simulator levels | Notes | ||
B | C | D | |||
1. | Instructor Operating Station (IOS), as appropriate | ||||
1.a. | Power switch(es) | X | X | X | |
1.b. | Helicopter conditions | X | X | X | e.g., GW, CG, Fuel loading, Systems, Ground Crew. |
1.c. | Airports/Heliports/Helicopter Landing Areas | X | X | X | e.g., Selection, Surface, Presets, Lighting controls |
1.d. | Environmental controls. | X | X | X | e.g., Clouds, Visibility, RVR, Temp, Wind, Ice, Snow, Rain, and Windshear. |
1.e. | Helicopter system malfunctions (Insertion/deletion) | X | X | X | |
1.f. | Locks, Freezes, and Repositioning | X | X | X | |
2. | Sound Controls. | ||||
2.a. | On/off/adjustment | X | X | X | |
3. | Motion/Control Loading System | ||||
3.a. | On/off/emergency stop | X | X | X | |
4. | Observer Seats/Stations | ||||
4.a. | Position/Adjustment/Positive restraint system | X | X | X | |
Attachment 2 to Appendix C to Part 60—FFS Objective Tests
Begin Information
Table of Contents
Paragraph No. | Title |
|---|---|
1. | Introduction. |
2. | Test Requirements. |
Table C2A, Objective Tests. | |
3. | General. |
4. | Control Dynamics. |
5. | [Reserved] |
6. | Motion System. |
7. | Sound System. |
8. | Additional Information About Flight Simulator Qualification for New or Derivative Helicopters. |
9. | Engineering Simulator—Validation Data. |
10. | [Reserved] |
11. | Validation Test Tolerances. |
12. | Validation Data Roadmap. |
13. | Acceptance Guidelines for Alternative Engines Data. |
14. | Acceptance Guidelines for Alternative Avionics (Flight-Related Computers and Controllers). |
15. | Transport Delay Testing. |
16. | Continuing Qualification Evaluations—Validation Test Data Presentation. |
17. | Alternative Data Sources, Procedures, and Instrumentation: Level A and Level B Simulators Only. |
1. Introduction
a. If relevant winds are present in the objective data, the wind vector (magnitude and direction) should be clearly noted as part of the data presentation, expressed in conventional terminology, and related to the runway being used for the test.
b. The NSPM will not evaluate any simulator unless the required SOC indicates that the motion system is designed and manufactured to safely operate within the simulator's maximum excursion, acceleration, and velocity capabilities (see Motion System in the following table).
c. Table C2A addresses helicopter simulators at Levels B, C, and D because there are no Level A Helicopter simulators.
End Information
Begin QPS Requirements
2. Test Requirements
a. The ground and flight tests required for qualification are listed in Table of C2A, FFS Objective Tests. Computer-generated simulator test results must be provided for each test except where an alternative test is specifically authorized by the NSPM. If a flight condition or operating condition is required for the test but does not apply to the helicopter being simulated or to the qualification level sought, it may be disregarded (e.g., an engine out missed approach for a single-engine helicopter, or a hover test for a Level B simulator). Each test result is compared against the validation data described in § 60.13 and in this appendix. Although use of a driver program designed to automatically accomplish the tests is encouraged for all simulators and required for Level C and Level D simulators, each test must be able to be accomplished manually while recording all appropriate parameters. The results must be produced on an appropriate recording device acceptable to the NSPM and must include simulator number, date, time, conditions, tolerances, and appropriate dependent variables portrayed in comparison to the validation data. Time histories are required unless otherwise indicated in Table C2A. All results must be labeled using the tolerances and units given.
b. Table C2A sets out the test results required, including the parameters, tolerances, and flight conditions for simulator validation. Tolerances are provided for the listed tests because mathematical modeling and acquisition/development of reference data are often inexact. All tolerances listed in the following tables are applied to simulator performance. When two tolerance values are given for a parameter, the less restrictive value may be used unless otherwise indicated. In those cases where a tolerance is expressed only as a percentage, the tolerance percentage applies to the maximum value of that parameter within its normal operating range as measured from the neutral or zero position unless otherwise indicated.
c. Certain tests included in this attachment must be supported with an SOC. In Table C2A, requirements for SOCs are indicated in the “Test Details” column.
d. When operational or engineering judgment is used in making assessments for flight test data applications for simulator validity, such judgment may not be limited to a single parameter. For example, data that exhibit rapid variations of the measured parameters may require interpolations or a “best fit” data selection. All relevant parameters related to a given maneuver or flight condition must be provided to allow overall interpretation. When it is difficult or impossible to match simulator to helicopter data throughout a time history, differences must be justified by providing a comparison of other related variables for the condition being assessed.
e. The FFS may not be programmed so that the mathematical modeling is correct only at the validation test points. Unless noted otherwise, simulator tests must represent helicopter performance and handling qualities at operating weights and centers of gravity (CG) typical of normal operation. If a test is supported by helicopter data at one extreme weight or CG, another test supported by helicopter data at mid-conditions or as close as possible to the other extreme must be included. Certain tests that are relevant only at one extreme CG or weight condition need not be repeated at the other extreme. Tests of handling qualities must include validation of augmentation devices.
f. When comparing the parameters listed to those of the helicopter, sufficient data must also be provided to verify the correct flight condition and helicopter configuration changes. For example, to show that control force is within ±0.5 pound (0.22 daN) in a static stability test, data to show the correct airspeed, power, thrust or torque, helicopter configuration, altitude, and other appropriate datum identification parameters must also be given. If comparing short period dynamics, normal acceleration may be used to establish a match to the helicopter, but airspeed, altitude, control input, helicopter configuration, and other appropriate data must also be given. All airspeed values must be properly annotated (e.g., indicated versus calibrated). In addition, the same variables must be used for comparison (e.g., compare inches to inches rather than inches to centimeters).
g. The QTG provided by the sponsor must clearly describe how the simulator will be set up and operated for each test. Each simulator subsystem may be tested independently, but overall integrated testing of the simulator must be accomplished to assure that the total simulator system meets the prescribed standards. A manual test procedure with explicit and detailed steps for completing each test must also be provided.
h. For previously qualified simulators, the tests and tolerances of this attachment may be used in subsequent continuing qualification evaluations for any given test if the sponsor has submitted a proposed MQTG revision to the NSPM and has received NSPM approval.
i. Motion System Tests:
(a) The minimum excursions, accelerations, and velocities for pitch, roll, and yaw must be measurable about a single, common reference point and must be achieved by driving one degree of freedom at a time.
(b) The minimum excursions, accelerations, and velocities for heave, sway, and surge may be measured about different, identifiable reference points and must be achieved by driving one degree of freedom at a time.
j. Tests of handling qualities must include validation of augmentation devices. FFSs for highly augmented helicopters will be validated both in the unaugmented configuration (or failure state with the maximum permitted degradation in handling qualities) and the augmented configuration. Where various levels of handling qualities result from failure states, validation of the effect of the failure is necessary. For those performance and static handling qualities tests where the primary concern is control position in the unaugmented configuration, unaugmented data are not required if the design of the system precludes any affect on control position. In those instances where the unaugmented helicopter response is divergent and non-repeatable, it may not be feasible to meet the specified tolerances. Alternative requirements for testing will be mutually agreed upon by the sponsor and the NSPM on a case-by-case basis.
k. Some tests will not be required for helicopters using helicopter hardware in the simulator flight deck (e.g., “helicopter modular controller”). These exceptions are noted in Table C2A of this attachment. However, in these cases, the sponsor must provide a statement that the helicopter hardware meets the appropriate manufacturer's specifications and the sponsor must have supporting information to that fact available for NSPM review.
l. In cases where light-class helicopters are being simulated, prior coordination with the NSPM on acceptable weight ranges is required. The terms “light”, “medium”, and “near maximum”, as defined in Appendix F of this part, may not be appropriate for the simulation of light-class helicopters.
End QPS Requirements
Begin Information
m. In those cases where the objective test results authorize a “snapshot test” or a “series of snapshot test results” in lieu of a time-history result, the sponsor or other data provider must ensure that a steady state condition exists at the instant of time captured by the “snapshot”. The steady state condition must exist from 4 seconds prior to, through 1 second following, the instant of time captured by the snap shot.
n. For references on basic operating weight, see AC 120-27, Aircraft Weight and Balance; and FAA-H-8083-1, Aircraft Weight and Balance Handbook.
End Information
Table C2A—Full Flight Simulator (FFS) Objective Tests
QPS requirements | Information | |||||||
|---|---|---|---|---|---|---|---|---|
Test | Tolerance(s) | Flight condition | Test details | Simulator level | Notes | |||
Entry No. | Title | B | C | D | ||||
1. Performance | ||||||||
1.a. | Engine Assessment | |||||||
1.a.1. | Start Operations | |||||||
1.a.1.a | Engine start and acceleration (transient) | Light Off Time—±10% or ±1 sec., Torque—±5%, Rotor Speed—±3%, Fuel Flow—±10%, Gas Generator Speed—±5%, Power Turbine Speed—±5%, Gas Turbine Temp.—±30 °C | Ground with the Rotor Brake Used and Not Used, if applicable. | Record each engine start from the initiation of the start sequence to steady state idle and from steady state idle to operating RPM. | X | X | X | |
1.a.1.b. | Steady State Idle and Operating RPM conditions | Torque—±3%, Rotor Speed—±1.5%, Fuel Flow—±5%, Gas Generator Speed—±2%, Power Turbine Speed—±2%, Turbine Gas Temp.—±20 °C | Ground | Record both steady state idle and operating RPM conditions. May be a series of snapshot tests. | X | X | X | |
1.a.2. | Power Turbine Speed Trim | ±10% of total change of power turbine speed, or ±0.5% change of rotor speed. | Ground | Record engine response to trim system actuation in both directions. | X | X | X | |
1.a.3. | Engine and Rotor Speed Governing | Torque—±5%, Rotor Speed—1.5% | Climb and descent | Record results using a step input to the collective. May be conducted concurrently with climb and descent performance tests. | X | X | X | |
1.b. | Surface Operations | |||||||
1.b.1. | Minimum Radius Turn | ±3 ft. (0.9m) or 20% of helicopter turn radius. | Ground | If brakes are used, brake pedal position and brake system pressure must be matched to the helicopter flight test value. | X | X | X | |
1.b.2. | Rate of Turn vs. Pedal Deflection, Brake Application, or Nosewheel Angle, as applicable | ±10% or ±2°/sec. Turn Rate. | Ground Takeoff | If brakes are used, brake pedal position and brake system pressure must be matched to the helicopter flight test value. | X | X | X | |
1.b.3. | Taxi | Pitch Angle—±1.5°, Torque—±3%, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5% | Ground | Record results for control position and pitch attitude during ground taxi for a specific ground speed, wind speed and direction, and density altitude. | X | X | X | |
1.b.4. | Brake Effectiveness | ±10% of time and distance. | Ground | X | X | X | ||
1.c. | TakeoffWhen the speed range for the following tests is less than 40 knots, the applicable airspeed tolerance may be applied to either airspeed or ground speed, as appropriate. | |||||||
1.c.1. | All Engines | Airspeed—±3 kt, Altitude—±20 ft (6.1m), Torque—±3%, Rotor Speed—±1.5%, Vertical Velocity—±100 fpm (0.50m/sec) or 10%, Pitch Attitude—±1.5°, Bank Attitude—±2°, Heading—±2°, Longitudinal Control Position—±10%, Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10% | Ground/Takeoff and Initial Segment of Climb. | Record results of takeoff flight path as appropriate to helicopter model simulated (running takeoff for Level B, takeoff from a hover for Level C and D). For Level B, the criteria apply only to those segments at airspeeds above effective translational lift. Results must be recorded from the initiation of the takeoff to at least 200 ft (61m) AGL. | X | X | X | |
1.c.2. | One Engine Inoperative continued takeoff. | Airspeed—±3 kt, Altitude—±20 ft (6.1m), Torque—±3%, Rotor Speed—±1.5%, Vertical Velocity—±100 fpm (0.50m/sec) or 10%, Pitch Attitude—±1.5°, Bank Attitude—±2°, Heading—±2°, Longitudinal Control Position—±10% Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10% | Ground/Takeoff; and Initial Segment of Climb. | Record takeoff flight path as appropriate to helicopter model simulated. Results must be recorded from the initiation of the takeoff to at least 200 ft (61m) AGL. | X | X | X | Because several kinds of takeoff procedures can be performed, the specific type of takeoff profile should be recorded to ensure the proper takeoff profile comparison test is used. |
1.c.3. | One Engine inoperative, rejected take off. | Airspeed—±3 kt, Altitude—±20 ft (6.1m), Torque—±3%, Rotor Speed—±1.5%, Pitch Attitude—±1.5°, Roll angle—±1.5°, Heading—±2°, Longitudinal Control Position—±10%, Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10%, Distance—±7.5% or ±30m (100ft). | Ground, Takeoff | Time history from the take off point to touch down. Test conditions near limiting performance. | X | X | ||
1.d. | Hover | |||||||
Performance | Torque—±3%, Pitch Attitude—±1.5°, Bank Attitude—±1.5°, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%. | In Ground Effect (IGE); and Out of Ground Effect (OGE). | Record results for light and heavy gross weights. May be a series of snapshot tests. | X | X | |||
1.e. | Vertical Climb | |||||||
Performance | Vertical Velocity—±100 fpm (0.50 m/sec) or ±10%, Directional Control Position—±5%, Collective Control Position—±5%. | From OGE Hover | Record results for light and heavy gross weights. May be a series of snapshot tests. | X | X | |||
1.f. | Level Flight | |||||||
Performance and Trimmed Flight Control Positions. | Torque—±3%, Pitch Attitude—±1.5°, Sideslip Angle—±2°, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%. | Cruise (Augmentation On and Off). | Record results for two gross weight and CG combinations with varying trim speeds throughout the airspeed envelope. May be a series of snapshot tests. | X | X | X | This test validates performance at speeds above maximum endurance airspeed. | |
1.g. | Climb | |||||||
Performance and Trimmed Flight Control Positions. | Vertical Velocity—±100 fpm (6.1m/sec) or ±10%, Pitch Attitude—±1.5°, Sideslip Angle—±2°, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%. | All engines operating; One engine inoperative; Augmentation System(s) On and Off. | Record results for two gross weight and CG combinations. The data presented must be for normal climb power conditions. May be a series of snapshot tests. | X | X | X | ||
1.h. | Descent | |||||||
1.h.1. | Descent Performance and Trimmed Flight Control Positions. | Torque—±3%, Pitch Attitude—±1.5°, Sideslip Angle—±2°, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%. | At or near 1,000 fpm (5 m/sec) rate of descent (RoD) at normal approach speed. Augmentation System(s) On and Off. | Results must be recorded for two gross weight and CG combinations. May be a series of snapshot tests. | X | X | X | |
1.h.2. | Autorotation Performance and Trimmed Flight Control Positions. | Pitch Attitude—±1.5°, Sideslip Angle—±2°, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%, Vertical Velocity—±100 fpm or 10%, Rotor Speed—±1.5%. | Steady descents. Augmentation System(s) On and Off. | Record results for two gross weight conditions. Data must be recorded for normal operating RPM. (Rotor speed tolerance applies only if collective control position is full down.) Data must be recorded for speeds from 50 kts, ±5 kts, through at least maximum glide distance airspeed, or maximum allowable autorotation airspeed, whichever is slower. May be a series of snapshot tests. | X | X | X | |
1.i. | Autorotation | |||||||
Entry | Rotor Speed—±3%, Pitch Attitude—±2°, Roll Attitude—±3°, Yaw Attitude—±5°, Airspeed—±5 kts., Vertical Velocity—±200 fpm (1.00 m/sec) or 10%. | Cruise or Climb | Record results of a rapid throttle reduction to idle. If the cruise condition is selected, comparison must be made for the maximum range airspeed. If the climb condition is selected, comparison must be made for the maximum rate of climb airspeed at or near maximum continuous power. | X | X | |||
1.j. | LandingWhen the speed range for tests 1.j.1., 1.j.2., or 1.j.3. is less than 40 knots, the applicable airspeed tolerance may be applied to either airspeed or ground speed, as appropriate. | |||||||
1.j.1. | All Engines | Airspeed—±3 kts., Altitude—±20 ft. (6.1m), Torque—±3%, Rotor Speed—±1.5%, Pitch Attitude—±1.5°, Bank Attitude—±1.5°, Heading—±2°, Longitudinal Control Position—±10%, Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10%. | Approach | Record results of the approach and landing profile as appropriate to the helicopter model simulated (running landing for Level B, or approach to a hover for Level C and D). For Level B, the criteria apply only to those segments at airspeeds above effective translational lift. | X | X | X | |
1.j.2. | One Engine Inoperative. | Airspeed—±3 kts., Altitude—±20 ft. (6.1m), Torque—±3%, Rotor Speed—±1.5%, Pitch Attitude—±1.5°, Bank Attitude—±1.5°, Heading—±2°, Longitudinal Control Position—±10%, Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10%. | Approach | Record results for both Category A and Category B approaches and landing as appropriate to helicopter model simulated. For Level B, the criteria apply only to those segments at airspeeds above effective translational lift. | X | X | X | |
1.j.3. | Balked Landing | Airspeed—±3 kts, Altitude—±20 ft. (6.1m), Torque—±3%, Rotor Speed—±1.5%, Pitch Attitude—±1.5°, Bank Attitude—±1.5°, Heading—±2°, Longitudinal Control Position—±10%, Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10%. | Approach | Record the results for the maneuver initiated from a stabilized approach at the landing decision point (LDP). | X | X | X | |
1.j.4. | Autorotational Landing. | Torque—±3%, Rotor Speed—±3%, Vertical Velocity—±100 fpm (0.50m/sec) or 10%, Pitch Attitude—±2°, Bank Attitude—±2°, Heading—±5°, Longitudinal Control Position—±10%, Lateral Control Position—±10%, Directional Control Position—±10%, Collective Control Position—±10%. | Landing | Record the results of an autorotational deceleration and landing from a stabilized autorotational descent, to touch down. If flight test data containing all required parameters for a complete power-off landing is not available from the aircraft manufacturer for this test and other qualified flight test personnel are not available to acquire this data, the sponsor may coordinate with the NSPM to determine if it is appropriate to accept alternative testing means. | X | X | Alternative approaches for acquiring this data may be acceptable, depending on the aircraft as well as the personnel and the data recording, reduction, and interpretation facilities to be used, are: (1) a simulated autorotational flare and reduction of rate of descent (ROD) at altitude; or (2) a power-on termination following an autorotational approach and flare. | |
2. Handling Qualities | ||||||||
2.a. | Control System Mechanical Characteristics | |||||||
For simulators requiring Static or Dynamic tests at the controls (i.e., cyclic, collective, and pedal), special test fixtures will not be required during initial or upgrade evaluations if the sponsor's QTG/MQTG shows both test fixture results and the results of an alternative approach, such as computer plots produced concurrently showing satisfactory agreement. Repeat of the alternative method during the initial or upgrade evaluation satisfies this test requirement. For initial and upgrade evaluations, the control dynamic characteristics must be measured at and recorded directly from the flight deck controls, and must be accomplished in hover, climb, cruise, and autorotation. | Contact the NSPM for clarification of any issue regarding helicopters with reversible controls or where the required validation data is not attainable. | |||||||
2.a.1. | Cyclic | Breakout—±0.25 lbs. (0.112 daN) or 25%; Force—±1.0 lb. (0.224 daN) or 10%. | Ground; Static conditions with the hydraulic system (if applicable) pressurized; supplemental hydraulic pressurization system may be used. Trim On and Off. Friction Off Augmentation (if applicable) On and Off. | Record results for an uninterrupted control sweep to the stops. (This test does not apply if aircraft hardware modular controllers are used.) | X | X | X | Flight Test Data for this test does not require the rotor to be engaged/turning. The phrase “if applicable” regarding stability augmentation systems means if an augmentation system is available and if this system may be operational on the ground under static conditions as described here. |
2.a.2. | Collective/Pedals | Breakout—±0.5 lb. (0.224 daN) or 25%; Force—±1.0 lb. (0.224 daN) or 10%. | Ground; Static conditions with the hydraulic system (if applicable) pressurized; supplemental hydraulic pressurization system may be used. Trim On and Off. Friction Off. Augmentation (if applicable) On and Off. | Record results for an uninterrupted control sweep to the stops. | X | X | X | Flight Test Data for this test does not require the rotor to be engaged/turning. The phrase “if applicable” regarding stability augmentation system means if a stability augmentation system is available and if this system may be operational on the ground under static conditions as described here. |
2.a.3. | Brake Pedal Force vs. Position. | ±5 lbs. (2.224 daN) or 10%. | Ground; Static conditions. | X | X | X | ||
2.a.4. | Trim System Rate (all applicable systems) | Rate—±10%. | Ground; Static conditions. Trim On, Friction Off. | The tolerance applies to the recorded value of the trim rate. | X | X | X | |
2.a.5. | Control Dynamics (all axes) | ±10% of time for first zero crossing and ±10 (N + 1)% of period thereafter, ±10% of amplitude of first overshoot, 20% of amplitude of 2nd and subsequent overshoots greater than 5% of initial displacement, ±1 overshoot. | Hover/Cruise, Trim On, Friction Off. | Results must be recorded for a normal control displacement in both directions in each axis. | X | X | Typically, control displacement of 25% to 50% is necessary for proper excitation. Control Dynamics for irreversible control systems may be evaluated in a ground/static condition. Additional information on control dynamics is found later in this attachment. “N” is the sequential period of a full cycle of oscillation. | |
2.a.6. | Control System Freeplay | ±0.10 inches (±2.5 mm). | Ground; Static conditions; with the hydraulic system (if applicable) pressurized; supplemental hydraulic pressurization system may be used. | Record and compare results for all controls. | X | X | X | Flight Test Data for this test does not require the rotor to be engaged/turning. |
2.b. | Low Airspeed Handling Qualities | |||||||
2.b.1. | Trimmed Flight Control Positions. | Torque—±3%, Pitch Attitude—±1.5°, Bank Attitude—±2°, Longitudinal Control Position—±5%. Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%. | Translational Flight IGE—Sideward, rearward, and forward flight. Augmentation On and Off. | Record results for several airspeed increments to the translational airspeed limits and for 45 kts. forward airspeed. May be a series of snapshot tests. | X | X | ||
2.b.2. | Critical Azimuth | Torque—±3%, Pitch Attitude—±1.5°, Bank Attitude—±2°, Longitudinal Control Position—±5%, Lateral Control Position—±5%, Directional Control Position—±5%, Collective Control Position—±5%. | Stationary Hover. Augmentation On and Off. | Record results for three relative wind directions (including the most critical case) in the critical quadrant. May be a series of snapshot tests. | X | X | ||
2.b.3. | Control Response | |||||||
2.b.3.a. | Longitudinal | Pitch Rate—±10% or ±2°/sec., Pitch Attitude Change—±10% or 1.5°. | Hover Augmentation On and Off. | Record results for a step control input. The Off-axis response must show correct trend for unaugmented cases. | X | X | This is a “short time” test conducted in a hover, in ground effect, without entering translational flight, to provide better visual reference. | |
2.b.3.b. | Lateral | Roll Rate—±10% or ±3°/sec., Roll Attitude Change—±10% or ±3°. | Hover Augmentation On and Off. | Record results for a step control input. The Off-axis response must show correct trend for unaugmented cases. | X | X | This is a “short time” test conducted in a hover, in ground effect, without entering translational flight, to provide better visual reference. | |
2.b.3.c. | Directional | Yaw Rate—±10% or ±2°/sec., Heading Change—±10% or ±2°. | Hover Augmentation On and Off. | Record results for a step control input. The Off-axis response must show correct trend for unaugmented cases. | X | X | This is a “short time” test conducted in a hover, in ground effect, without entering translational flight, to provide better visual reference. | |
2.b.3.d. | Vertical | Normal Acceleration—±0.1 g. | Hover Augmentation On and Off. | Record results for a step control input. The Off-axis response must show correct trend for unaugmented cases. | X | X | ||
2.c. | Longitudinal Handling Qualities | |||||||
2.c.1. | Control Response | Pitch Rate—±10% or ±2°/sec., Pitch Attitude Change—±10% or ±1.5°. | Cruise Augmentation On and Off. | Results must be recorded for two cruise airspeeds to include minimum power required speed. Record data for a step control input. The Off-axis response must show correct trend for unaugmented cases. | X | X | X | |
2.c.2. | Static Stability | Longitudinal Control Position: ±10% of change from trim or ±0.25 in. (6.3 mm) or Longitudinal Control Force : ±0.5 lb. (0.223 daN) or ±10%. | Cruise or Climb. Autorotation. Augmentation On and Off. | Record results for a minimum of two speeds on each side of the trim speed. May be a series of snapshot tests. | X | X | X | |
2.c.3. | Dynamic Stability | |||||||
2.c.3.a. | Long-Term Response. | ±10% of calculated period, ±10% of time to 1⁄2 or double amplitude, or ±0.02 of damping ratio.For non-periodic responses, the time history must be matched within ±3° pitch; and ±5 kts airspeed over a 20 sec period following release of the controls. | Cruise Augmentation On and Off. | For periodic responses, record results for three full cycles (6 overshoots after input completed) or that sufficient to determine time to 1⁄2 or double amplitude, whichever is less.The test may be terminated prior to 20 sec. if the test pilot determines that the results are becoming uncontrollably divergent. | X | X | X | The response may be unrepeatable throughout the stated time for certain helicopters. In these cases, the test should show at least that a divergence is identifiable. For example: Displacing the cyclic for a given time normally excites this test or until a given pitch attitude is achieved and then return the cyclic to the original position. For non-periodic responses, results should show the same convergent or divergent character as the flight test data. |
2.c.3.b. | Short-Term Response. | ±1.5° Pitch or ±2°/sec. Pitch Rate. ±0.1 g Normal Acceleration. | Cruise or Climb. Augmentation On and Off. | Record results for at least two airspeeds. | X | X | X | A control doublet inserted at the natural frequency of the aircraft normally excites this test. However, while input doublets are preferred over pulse inputs for Augmentation-Off tests, for Augmentation-On tests, when the short-term response exhibits 1st-order or deadbeat characteristics, longitudinal pulse inputs may produce a more coherent response. |
2.c.4. | Maneuvering Stability. | Longitudinal Control Position—±10% of change from trim or ±0.25 in. (6.3 mm) or Longitudinal Control Forces—±0.5 lb. (0.223 daN) or ±10%. | Cruise or Climb. Augmentation On and Off. | Record results for at least two airspeeds at 30°-45° roll angle. The force may be shown as a cross plot for irreversible systems. May be a series of snapshot tests. | X | X | X | |
2.d. | Lateral and Directional Handling Qualities | |||||||
2.d.1. | Control Response | |||||||
2.d.1.a | Lateral | Roll Rate—±10% or ±3°/sec., Roll Attitude Change—±10% or ±3°. | Cruise Augmentation On and Off. | Record results for at least two airspeeds, including the speed at or near the minimum power required airspeed.Record results for a step control input. The Off-axis response must show correct trend for unaugmented cases | X | X | X | |
2.d.1.b. | Directional | Yaw Rate—±10% or ±2°/sec., Yaw Attitude Change—±10% or ±2°. | Cruise Augmentation On and Off. | Record data for at least two airspeeds, including the speed at or near the minimum power required airspeed.Record results for a step control input. The Off-axis response must show correct trend for unaugmented cases. | X | X | X | |
2.d.2. | Directional Static Stability. | Lateral Control Position—±10% of change from trim or ±0.25 in. (6.3 mm) or Lateral Control Force—±0.5 lb. (0.223 daN) or 10%, Roll Attitude—±1.5, Directional Control Position—±10% of change from trim or ±0.25 in. (6.3 mm) or Directional Control Force—±1 lb. (0.448 daN) or 10%, Longitudinal Control Position—±10% of change from trim or ±0.25 in. (6.3 mm), Vertical Velocity—±100 fpm (0.50m/sec) or 10%. | Cruise; or Climb (may use Descent instead of Climb if desired), Augmentation On and Off. | Record results for at least two sideslip angles on either side of the trim point. The force may be shown as a cross plot for irreversible systems. May be a series of snapshot tests. | X | X | X | This is a steady heading sideslip test at a fixed collective position. |
2.d.3. | Dynamic Lateral and Directional Stability | |||||||
2.d.3.a. | Lateral-Directional Oscillations. | ±0.5 sec. or ±10% of period, ±10% of time to 1⁄2 or double amplitude or ±0.02 of damping ratio, ±20% or ±1 sec of time difference between peaks of bank and sideslip. For non-periodic responses, the time history must be matched within ±10 knots Airspeed; ±5°/s Roll Rate or ±5° Roll Attitude; ±4°/s Yaw Rate or ±4° Yaw Angle over a 20 sec period roll angle following release of the controls. | Cruise or Climb. Augmentation On and Off. | Record results for at least two airspeeds. The test must be initiated with a cyclic or a pedal doublet input. Record results for six full cycles (12 overshoots after input completed) or that sufficient to determine time to 1⁄2 or double amplitude, whichever is less. The test may be terminated prior to 20 sec if the test pilot determines that the results are becoming uncontrollably divergent. | X | X | X | |
2.d.3.b. | Spiral Stability. | ±2° or ±10% roll angle. | Cruise or Climb. Augmentation On and Off. | Record the results of a release from pedal only or cyclic only turns for 20 sec. Results must be recorded from turns in both directions. Terminate check at zero roll angle or when the test pilot determines that the attitude is becoming uncontrollably divergent. | X | X | X | |
2.d.3.c. | Adverse/Proverse Yaw. | Correct Trend, ±2° transient sideslip angle. | Cruise or Climb. Augmentation On and Off. | Record the time history of initial entry into cyclic only turns, using only a moderate rate for cyclic input. Results must be recorded for turns in both directions. | X | X | X | |
3. Motion System | ||||||||
3.a. | Frequency response | |||||||
Based on Simulator Capability. | N/A | Required as part of the MQTG. The test must demonstrate frequency response of the motion system as specified by the applicant for flight simulator qualification. | X | X | X | |||
3.b. | Leg Balance | |||||||
Leg Balance | Based on Simulator Capability. | N/A | Required as part of the MQTG. The test must demonstrate motion system leg balance as specified by the applicant for flight simulator qualification. | X | X | X | ||
3.c. | Turn Around | |||||||
Turn Around | Based on Simulator Capability. | N/A | Required as part of the MQTG. The test must demonstrate a smooth turn-around (shift to opposite direction of movement) of the motion system as specified by the applicant for flight simulator qualification. | X | X | X | ||
3.d. | Motion system repeatability | |||||||
With the same input signal, the test results must be repeatable to within ±0.05g actual platform linear acceleration in each axis. | Accomplished in both the “ground” mode and in the “flight” mode of the motion system operation. | Required as part of the MQTG. The test is accomplished by injecting a motion signal to generate movement of the platform. The input must be such that the rotational accelerations, rotational rates, and linear accelerations are inserted before the transfer from helicopter center of gravity to the pilot reference point with a minimum amplitude of 5°/sec/sec, 10°/sec and 0.3g, respectively. | X | X | X | See Paragraph 6.c. in this attachment for additional information. Note: if there is no difference in the model for “ground” and “flight” operation of the motion system, this should be described in an SOC and will not require tests in both modes. | ||
3.e. | Motion cueing performance signature | |||||||
Required as part of MQTG. These tests must be run with the motion buffet mode disabled. | See paragraph 6.d., of this attachment, Motion cueing performance signature. | |||||||
3.e.1. | Takeoff (all engines). | As specified by the sponsor for flight simulator qualification. | Ground | Pitch attitude due to initial climb must dominate over cab tilt due to longitudinal acceleration. | X | X | X | Associated to test number 1.c.1. |
3.e.2. | Hover performance (IGE and OGE). | As specified by the sponsor for flight simulator qualification. | Ground | X | X | Associated to test number 1.d. | ||
3.e.3. | Autorotation (entry). | As specified by the sponsor for flight simulator qualification. | Flight | X | X | Associated to test number 1.i. | ||
3.e.4. | Landing (all engines). | As specified by the sponsor for flight simulator qualification. | Flight | X | X | X | Associated to test number 1.j.1. | |
3.e.5. | Autorotation (landing). | As specified by the sponsor for flight simulator qualification. | Flight | X | X | Associated to test number 1.j.4. | ||
3.e.6. | Control Response | |||||||
3.e.6.a. | Longitudinal | As specified by the sponsor for flight simulator qualification. | Flight | X | X | X | Associated to test number 2.c.1. | |
3.e.6.b. | Lateral. | As specified by the sponsor for flight simulator qualification. | Ground | X | X | X | Associated to test number 2.d.1.a. | |
3.e.6.c. | Directional | As specified by the sponsor for flight simulator qualification. | X | X | X | Associated to test number 2.d.1.c. | ||
3.f. | Characteristic Motion (Vibration) Cues—For all of the following tests, the simulator test results must exhibit the overall appearance and trends of the helicopter data, with at least three (3) of the predominant frequency “spikes” being present within ±2 Hz. | Characteristic motion cues may be separate from the “main” motion system. | ||||||
3.f.1. | Vibrations—to include 1/Rev and n/Rev vibrations (where “n” is the number of main rotor blades). | + 3db to −6db or ±10% of nominal vibration level in flight cruise and correct trend (see comment). | (a) On ground (idle);(b) In flight | Characteristic vibrations include those that result from operation of the helicopter (for example, high airspeed, retreating blade stall, extended landing gear, vortex ring or settling with power) in so far as vibration marks an event or helicopter state, which can be sensed in the flight deck.[See Table C1A, table entries 5.e. and 5.f.] | X | Correct trend refers to a comparison of vibration amplitudes between different maneuvers; e.g., if the 1/rev vibration amplitude in the helicopter is higher during steady state turns than in level flight this increasing trend should be demonstrated in the simulator. Additional examples of vibrations may include:(a) Low & High speed transition to and from hover; (b) Level flight; (c) Climb and descent (including vertical climb; (d) Auto-rotation; (e) Steady Turns. | ||
3.f.2. | Buffet—Test against recorded results for characteristic buffet motion that can be sensed in the flight deck. | + 3db to −6db or ±10% of nominal vibration level in flight cruise and correct trend (see comment). | On ground and in flight. | Characteristic buffets include those that result from operation of the helicopter (for example, high airspeed, retreating blade stall, extended landing gear, vortex ring or settling with power) in so far as a buffet marks an event or helicopter state, which can be sensed in the flight deck.[See Table C1A, table entries 5.e. and 5.f.] | X | The recorded test results for characteristic buffets should allow the checking of relative amplitude for different frequencies.For atmospheric disturbance, general purpose models are acceptable which approximate demonstrable flight test data. | ||
4. Visual System | ||||||||
4.a. | Visual System Response Time: (Choose either test 4.a.1. or 4.a.2. to satisfy test 4.a., Visual System Response Time Test. This test is also sufficient for motion system response timing and flight deck instrument response timing.) | |||||||
4.a.1. | Latency | |||||||
150 ms (or less) after helicopter response. | Takeoff, climb, and descent. | One test is required in each axis (pitch, roll and yaw) for each of the three conditions (take-off, cruise, and approach or landing). | X | |||||
100 ms (or less) after helicopter response. | Climb, cruise, descent, and hover. | One test is required in each axis (pitch, roll and yaw) for each of the three conditions (take-off, cruise, and approach or landing). | X | X | ||||
4.a.2. | Transport Delay | |||||||
If Transport Delay is the chosen method to demonstrate relative responses, the sponsor and the NSPM will use the latency values to ensure proper simulator response when reviewing those existing tests where latency can be identified (e.g., short period, roll response, rudder response). | ||||||||
150 ms (or less) after controller movement. | N/A | A separate test is required in each axis (pitch, roll, and yaw). | X | |||||
100 ms (or less) after controller movement. | N/A | A separate test is required in each axis (pitch, roll, and yaw). | X | X | ||||
4.b. | Field-of-view | |||||||
4.b.1. | Continuous field-of-view. | The simulator must provide a continuous field-of-view of at least 75° horizontally and 30° vertically per pilot seat or the number of degrees necessary to meet the visual ground segment requirement, whichever is greater. Both pilot seat visual systems must be operable simultaneously. Wide-angle systems providing cross-flight deck viewing (for both pilots simultaneously) must provide a minimum field-of-view of at least 146° horizontally and 36° vertically. Any geometric error between the Image Generator eye point and the pilot eye point must be 8° or less. | N/A | An SOC is required and must explain the geometry of the installation.Additional horizontal field-of-view capability may be added at the sponsor's discretion provided the minimum field-of-view is retained. | X | Horizontal field-of-view is centered on the zero degree azimuth line relative to the aircraft fuselage. Field-of-view may be measured using a visual test pattern filling the entire visual scene (all channels) with a matrix of black and white 5° squares. | ||
4.b.2. | Continuous field-of-view. | The simulator must provide a continuous field-of-view of at least 146° horizontally and 36° vertically or the number of degrees necessary to meet the visual ground segment requirement, whichever is greater. The minimum horizontal field-of-view coverage must be plus and minus one-half (1⁄2) of the minimum continuous field-of-view requirement, centered on the zero degree azimuth line relative to the aircraft fuselage. Any geometric error between the Image Generator eye point and the pilot eye point must be 8° or less. | N/A | An SOC is required and must explain the geometry of the installation.Horizontal field-of-view of at least 146° (including not less than 73° measured either side of the center of the design eye point). Additional horizontal field-of-view capability may be added at the sponsor's discretion provided the minimum field-of-view is retained. Vertical field-of-view of at least 36° measured from the pilot's and co-pilot's eye point. | X | Horizontal field-of-view is centered on the zero degree azimuth line relative to the aircraft fuselage. Field-of-view may be measured using a visual test pattern filling the entire visual scene (all channels) with a matrix of black and white 5° squares. | ||
4.b.3. | Continuous field-of-view. | Continuous field-of-view of at least 176° horizontal and 56° vertical field-of-view for each pilot simultaneously. Any geometric error between the Image Generator eye point and the pilot eye point must be 8° or less. | N/A | An SOC is required and must explain the geometry of the installation.Horizontal field-of-view is centered on the zero degree azimuth line relative to the aircraft fuselage. Horizontal field-of-view must be at least 176° (including not less than 88° either side of the center of the design eye point). Additional horizontal field-of-view capability may be added at the sponsor's discretion provided the minimum field-of-view is retained. Vertical field-of-view must not be less than a total of 56° measured from the pilot's and co-pilot's eye point | X | The horizontal field-of-view is traditionally described as a 180° field-of-view. However, the field-of-view is technically no less than 176°. Field-of-view may be measured using a visual test pattern filling the entire visual scene (all channels) with a matrix of black and white 5° squares. | ||
4.c. | Surface contrast ratio. | Not less than 5:1. | N/A | The ratio is calculated by dividing the brightness level of the center, bright square (providing at least 2 foot-lamberts or 7 cd/m2) by the brightness level of any adjacent dark square. | X | Measurements may be made using a 1° spot photometer and a raster drawn test pattern filling the entire visual scene (all channels) with a test pattern of black and white squares, 5 per square, with a white square in the center of each channel. During contrast ratio testing, simulator aft-cab and flight deck ambient light levels should be zero. | ||
4.d. | Highlight brightness. | Not less than six (6) foot-lamberts (20 cd/m2). | N/A | Measure the brightness of the center, white square while superimposing a highlight on that white square. The use of calligraphic capabilities to enhance the raster brightness is acceptable; however, measuring light points is not acceptable. | X | Measurements may be made using a 1° spot photometer and a raster drawn test pattern filling the entire visual scene (all channels) with a test pattern of black and white squares, 5 per square, with a white square in the center of each channel. | ||
4.e. | Surface resolution. | Not greater than two (2) arc minutes. | N/A | An SOC is required and must include the appropriate calculations and an explanation of those calculations. Level B requires surface resolution not greater than three (3) arc minutes. | X | X | When the eye is positioned on a 3° glide slope at the slant range distances indicated with white runway markings on a black runway surface, the eye will subtend two (2) arc minutes: (1) A slant range of 6,876 ft with stripes 150 ft long and 16 ft wide, spaced 4 ft apart. (2) For Configuration A, a slant range of 5,157 feet with stripes 150 ft long and 12 ft wide, spaced 3 ft apart. (3) For Configuration B, a slant range of 9,884 feet, with stripes 150 ft long and 5.75 ft wide, spaced 5.75 ft apart. | |
4.f. | Light point size | Not greater than five (5) arc minutes. | N/A | An SOC is required and must include the relevant calculations and an explanation of those calculations. | X | X | Light point size may be measured using a test pattern consisting of a centrally located single row of light points reduced in length until modulation is just discernible in each visual channel. A row of 48 lights will form a 4° angle or less. | |
4.g. | Light point contrast ratio. | A 1° spot photometer may be used to measure a square of at least 1° filled with light points (where light point modulation is just discernible) and compare the results to the measured adjacent background. During contrast ratio testing, simulator aft-cab and flight deck ambient light levels should be zero. | ||||||
4.g.1. | Not less than 10:1 | N/A | An SOC is required and must include the relevant calculations. | X | ||||
4.g.2. | Not less than 25:1 | N/A | An SOC is required and must include the relevant calculations. | X | X | |||
4.h. | Visual ground segment | |||||||
The visible segment in the simulator must be ±20% of the segment computed to be visible from the helicopter flight deck. This tolerance may be applied at the far end of the displayed segment. However, lights and ground objects computed to be visible from the helicopter flight deck at the near end of the visible segment must be visible in the simulator. | Landing configuration, with the aircraft trimmed for the appropriate airspeed, where the MLG are at 100 ft (30 m) above the plane of the touchdown zone, on the electronic glide slope with an RVR value set at 1,200 ft (350 m). | The QTG must contain appropriate calculations and a drawing showing the data used to establish the helicopter location and the segment of the ground that is visible considering design eye point, the helicopter attitude, flight deck cut-off angle, and a visibility of 1200 ft (350 m) RVR. Simulator performance must be measured against the QTG calculations. The data submitted must include at least the following: | X | X | X | Pre-positioning for this test is encouraged, and may be achieved via manual or autopilot control to the desired position. | ||
(1) Static helicopter dimensions as follows:(i) Horizontal and vertical distance from main landing gear (MLG) to glideslope reception antenna. (ii) Horizontal and vertical distance from MLG to pilot's eyepoint. (iii) Static flight deck cutoff angle. (2) Approach data as follows: (i) Identification of runway. (ii) Horizontal distance from runway threshold to glideslope intercept with runway. (iii) Glideslope angle. (iv) Helicopter pitch angle on approach. (3) Helicopter data for manual testing: (i) Gross weight. (ii) Helicopter configuration. (iii) Approach airspeed. If non-homogenous fog is used to obscure visibility, the vertical variation in horizontal visibility must be described and be included in the slant range visibility calculation used in the computations. | ||||||||
5. | Sound system | |||||||
The sponsor will not be required to repeat the helicopter tests (i.e., tests 5.a.1. through 5.a.8. (or 5.b.1. through 5.b.9.) and 5.c., as appropriate) during continuing qualification evaluations if frequency response and background noise test results are within tolerance when compared to the initial qualification evaluation results, and the sponsor shows that no software changes have occurred that will affect the helicopter test results. If the frequency response test method is chosen and fails, the sponsor may elect to fix the frequency response problem and repeat the test or the sponsor may elect to repeat the helicopter tests. If the helicopter tests are repeated during continuing qualification evaluations, the results may be compared against initial qualification evaluation results or helicopter master data. All tests in this section must be presented using an unweighted 1⁄3-octave band format from band 17 to 42 (50 Hz to 16 kHz). A minimum 20 second average must be taken at the location corresponding to the helicopter data set. The helicopter and flight simulator results must be produced using comparable data analysis techniques. | ||||||||
5.a. | Basic requirements | |||||||
5.a.1. | Ready for engine start. | ±5 dB per 1⁄3 octave band. | Ground | Normal condition prior to engine start. The APU must be on if appropriate. | X | |||
5.a.2. | All engines at idle; rotor not turning (if applicable) and rotor turning. | ±5 dB per 1⁄3 octave band. | Ground | Normal condition prior to lift-off. | X | |||
5.a.3. | Hover | ±5 dB per 1⁄3 octave band. | Hover | X | ||||
5.a.4. | Climb | ±5 dB per 1⁄3 octave band. | En-route climb | Medium altitude | X | |||
5.a.5. | Cruise | ±5 dB per 1⁄3 octave band. | Cruise | Normal cruise configuration. | X | |||
5.a.6. | Final approach | ±5 dB per 1⁄3 octave band. | Landing | Constant airspeed, gear down. | X | |||
5.b. | Special cases | |||||||
±5 dB per 1⁄3 octave band. | As appropriate | X | These special cases are identified as particularly significant during critical phases of flight and ground operations for a specific helicopter type or model. | |||||
5.c. | Background noise | |||||||
±3 dB per 1⁄3 octave band. | As appropriate | Results of the background noise at initial qualification must be included in the MQTG. Measurements must be made with the simulation running, the sound muted, and a “dead” flight deck. | X | The simulated sound will be evaluated to ensure that the background noise does not interfere with training, testing, or checking. | ||||
5.d. | Frequency response | |||||||
±5 dB on three (3) consecutive bands when compared to initial evaluation; and ±2 dB when comparing the average of the absolute differences between initial and continuing qualification evaluation. | Applicable only to Continuing Qualification Evaluations. If frequency response plots are provided for each channel at the initial evaluation, these plots may be repeated at the continuing qualification evaluation with the following tolerances applied:(a) The continuing qualification 1/3 octave band amplitudes must not exceed ±5 dB for three consecutive bands when compared to initial results. (b) The average of the sum of the absolute differences between initial and continuing qualification results must not exceed 2 dB (refer to table C2C in Appendix C). | X | Measurements are compared to those taken during initial qualification evaluation. | |||||
Begin Information
3. General
a. If relevant winds are present in the objective data, the wind vector should be clearly noted as part of the data presentation, expressed in conventional terminology, and related to the runway being used for test near the ground.
b. The reader is encouraged to review the Airplane Flight Simulator Evaluation Handbook, Volumes I and II, published by the Royal Aeronautical Society, London, UK, and FAA AC 25-7, as amended, Flight Test Guide for Certification of Transport Category Airplanes, and AC 23-8, as amended, Flight Test Guide for Certification of Part 23 Airplanes, for references and examples regarding flight testing requirements and techniques.
4. Control Dynamics
a. General. The characteristics of a helicopter flight control system have a major effect on the handling qualities. A significant consideration in pilot acceptability of a helicopter is the “feel” provided through the flight controls. Considerable effort is expended on helicopter feel system design so that pilots will be comfortable and will consider the helicopter desirable to fly. In order for an FFS to be representative, it should “feel” like the helicopter being simulated. Compliance with this requirement is determined by comparing a recording of the control feel dynamics of the FFS to actual helicopter measurements in the hover and cruise configurations.
(1) Recordings such as free response to an impulse or step function are classically used to estimate the dynamic properties of electromechanical systems. In any case, it is only possible to estimate the dynamic properties as a result of only being able to estimate true inputs and responses. Therefore, it is imperative that the best possible data be collected since close matching of the FFS control loading system to the helicopter system is essential. The required dynamic control tests are described in Table C2A of this attachment.
(2) For initial and upgrade evaluations, the QPS requires that control dynamics characteristics be measured and recorded directly from the flight controls (Handling Qualities—Table C2A). This procedure is usually accomplished by measuring the free response of the controls using a step or impulse input to excite the system. The procedure should be accomplished in the hover and cruise flight conditions and configurations.
(3) For helicopters with irreversible control systems, measurements may be obtained on the ground if proper pitot-static inputs are provided to represent airspeeds typical of those encountered in flight. Likewise, it may be shown that for some helicopters, hover, climb, cruise, and autorotation have like effects. Thus, one may suffice for another. If either or both considerations apply, engineering validation or helicopter manufacturer rationale should be submitted as justification for ground tests or for eliminating a configuration. For FFSs requiring static and dynamic tests at the controls, special test fixtures will not be required during initial and upgrade evaluations if the QTG shows both test fixture results and the results of an alternate approach (e.g., computer plots that were produced concurrently and show satisfactory agreement). Repeat of the alternate method during the initial evaluation satisfies this test requirement.
b. Control Dynamics Evaluations. The dynamic properties of control systems are often stated in terms of frequency, damping, and a number of other classical measurements. In order to establish a consistent means of validating test results for FFS control loading, criteria are needed that will clearly define the measurement interpretation and the applied tolerances. Criteria are needed for underdamped, critically damped and overdamped systems. In the case of an underdamped system with very light damping, the system may be quantified in terms of frequency and damping. In critically damped or overdamped systems, the frequency and damping are not readily measured from a response time history. Therefore, the following suggested measurements may be used:
(1) For Levels C and D simulators. Tests to verify that control feel dynamics represent the helicopter should show that the dynamic damping cycles (free response of the controls) match those of the helicopter within specified tolerances. The NSPM recognizes that several different testing methods may be used to verify the control feel dynamic response. The NSPM will consider the merits of testing methods based on reliability and consistency. One acceptable method of evaluating the response and the tolerance to be applied is described below for the underdamped and critically damped cases. A sponsor using this method to comply with the QPS requirements should perform the tests as follows:
(a) Underdamped Response. Two measurements are required for the period, the time to first zero crossing (in case a rate limit is present) and the subsequent frequency of oscillation. It is necessary to measure cycles on an individual basis in case there are non-uniform periods in the response. Each period will be independently compared to the respective period of the helicopter control system and, consequently, will enjoy the full tolerance specified for that period. The damping tolerance will be applied to overshoots on an individual basis. Care should be taken when applying the tolerance to small overshoots since the significance of such overshoots becomes questionable. Only those overshoots larger than 5 percent of the total initial displacement should be considered significant. The residual band, labeled T(Ad) on Figure C2A is ±5 percent of the initial displacement amplitude Ad from the steady state value of the oscillation. Only oscillations outside the residual band are considered significant. When comparing FFS data to helicopter data, the process should begin by overlaying or aligning the FFS and helicopter steady state values and then comparing amplitudes of oscillation peaks, the time of the first zero crossing, and individual periods of oscillation. The FFS should show the same number of significant overshoots to within one when compared against the helicopter data. The procedure for evaluating the response is illustrated in Figure C2A.
(b) Critically damped and Overdamped Response. Due to the nature of critically damped and overdamped responses (no overshoots), the time to reach 90 percent of the steady state (neutral point) value should be the same as the helicopter within ±10 percent. The simulator response must be critically damped also. Figure C2B illustrates the procedure.
(c) Special considerations. Control systems that exhibit characteristics other than classical overdamped or underdamped responses should meet specified tolerances. In addition, special consideration should be given to ensure that significant trends are maintained.
(2) Tolerances.
(a) The following summarizes the tolerances, “T” for underdamped systems, and “n” is the sequential period of a full cycle of oscillation. See Figure C2A of this attachment for an illustration of the referenced measurements.
T(P0) | ±10% of P0 |
T(P1) | ±20% of P1 |
T(P2) | ±30% of P2 |
T(Pn) | ±10(n + 1)% of Pn |
T(An) | ±10% of A1, ±20% of Subsequent Peaks |
T(Ad) | ±5% of Ad = residual band |
Significant overshoots. First overshoot and ±1 subsequent overshoots
(b) The following tolerance applies to critically damped and overdamped systems only. See Figure C2B for an illustration of the reference measurements:
T(P0) | ±10% of P0 |
End Information
Begin QPS Requirement
c. Alternative method for control dynamics evaluation.
(1) An alternative means for validating control dynamics for aircraft with hydraulically powered flight controls and artificial feel systems is by the measurement of control force and rate of movement. For each axis of pitch, roll, and yaw, the control must be forced to its maximum extreme position for the following distinct rates. These tests are conducted under normal flight and ground conditions.
(a) Static test—Slowly move the control so that a full sweep is achieved within 95-105 seconds. A full sweep is defined as movement of the controller from neutral to the stop, usually aft or right stop, then to the opposite stop, then to the neutral position.
(b) Slow dynamic test—Achieve a full sweep within 8-12 seconds.
(c) Fast dynamic test—Achieve a full sweep in within 3-5 seconds.
Note:
Dynamic sweeps may be limited to forces not exceeding 100 lbs. (44.5 daN).
(d) Tolerances
(i) Static test—see Table C2A, FFS Objective Tests, Entries 2.a.1., 2.a.2., and 2.a.3.
(ii) Dynamic test—±2 lbs (0.9 daN) or ±10% on dynamic increment above static test.
End QPS Requirement
Begin Information
d. The FAA is open to alternative means that are justified and appropriate to the application. For example, the method described here may not apply to all manufacturers systems and certainly not to aircraft with reversible control systems. Each case is considered on its own merit on an ad hoc basis. If the FAA finds that alternative methods do not result in satisfactory performance, more conventionally accepted methods will have to be used.
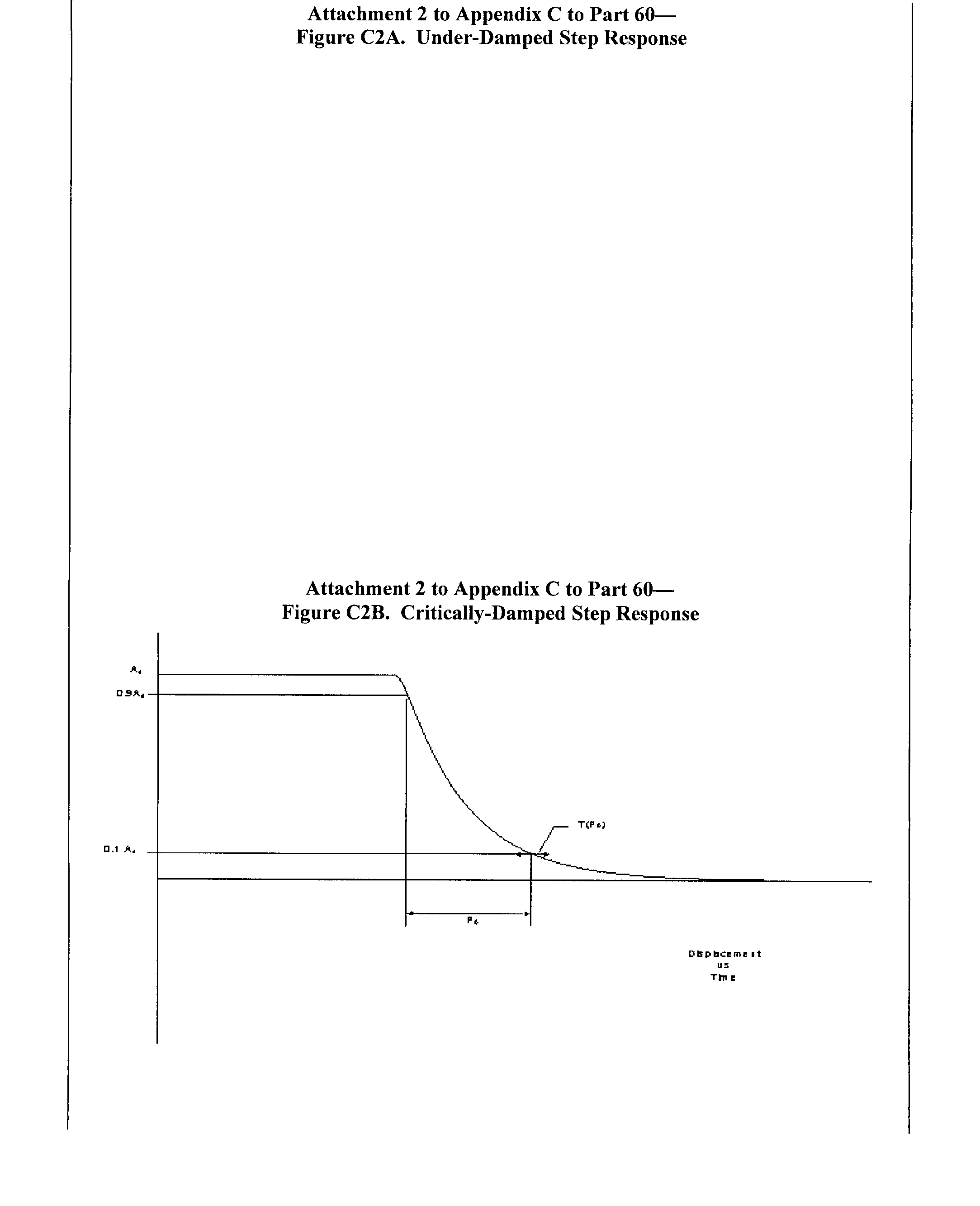
End Information
5. [Reserved]
Begin Information
6. Motion System.
a. General.
(1) Pilots use continuous information signals to regulate the state of the helicopter. In concert with the instruments and outside-world visual information, whole-body motion feedback is essential in assisting the pilot to control the helicopter dynamics, particularly in the presence of external disturbances. The motion system should meet basic objective performance criteria, and be subjectively tuned at the pilot's seat position to represent the linear and angular accelerations of the helicopter during a prescribed minimum set of maneuvers and conditions. The response of the motion cueing system should be repeatable.
(2) The Motion System tests in Section 3 of Table C2A are intended to qualify the FFS motion cueing system from a mechanical performance standpoint. Additionally, the list of motion effects provides a representative sample of dynamic conditions that should be present in the flight simulator. An additional list of representative, training-critical maneuvers, selected from Section 1, (Performance tests) and Section 2, (Handling Qualities tests) in Table C2A, that should be recorded during initial qualification (but without tolerance) to indicate the flight simulator motion cueing performance signature have been identified (reference Section 3.e). These tests are intended to help improve the overall standard of FFS motion cueing.
b. Motion System Checks. The intent of test 3a, Frequency Response, test 3b, Leg Balance, and test 3c, Turn-Around Check, as described in the Table of Objective Tests, is to demonstrate the performance of the motion system hardware, and to check the integrity of the motion set-up with regard to calibration and wear. These tests are independent of the motion cueing software and should be considered robotic tests.
c. Motion System Repeatability. The intent of this test is to ensure that the motion system software and motion system hardware have not degraded or changed over time. This diagnostic test should be completed during continuing qualification checks in lieu of the robotic tests. This will allow an improved ability to determine changes in the software or determine degradation in the hardware. The following information delineates the methodology that should be used for this test.
(1) Input: The inputs should be such that rotational accelerations, rotational rates, and linear accelerations are inserted before the transfer from helicopter center of gravity to pilot reference point with a minimum amplitude of 5 deg/sec/sec, 10 deg/sec and 0.3 g, respectively, to provide adequate analysis of the output.
(2) Recommended output:
(a) Actual platform linear accelerations; the output will comprise accelerations due to both the linear and rotational motion acceleration;
(b) Motion actuators position.
d. Motion Cueing Performance Signature.
(1) Background. The intent of this test is to provide quantitative time history records of motion system response to a selected set of automated QTG maneuvers during initial qualification. It is not intended to be a comparison of the motion platform accelerations against the flight test recorded accelerations (i.e., not to be compared against helicopter cueing). If there is a modification to the initially qualified motion software or motion hardware (e.g., motion washout filter, simulator payload change greater than 10%) then a new baseline may need to be established.
(2) Test Selection. The conditions identified in Section 3.e. in Table C2A are those maneuvers where motion cueing is the most discernible. They are general tests applicable to all types of helicopters and should be completed for motion cueing performance signature at any time acceptable to the NSPM prior to or during the initial qualification evaluation, and the results included in the MQTG.
(3) Priority. Motion system should be designed with the intent of placing greater importance on those maneuvers that directly influence pilot perception and control of the helicopter motions. For the maneuvers identified in section 3.e. in Table C2A, the flight simulator motion cueing system should have a high tilt co-ordination gain, high rotational gain, and high correlation with respect to the helicopter simulation model.
(4) Data Recording. The minimum list of parameters provided should allow for the determination of the flight simulator's motion cueing performance signature for the initial qualification evaluation. The following parameters are recommended as being acceptable to perform such a function:
(a) Flight model acceleration and rotational rate commands at the pilot reference point;
(b) Motion actuators position;
(c) Actual platform position;
(d) Actual platform acceleration at pilot reference point.
e. Motion Vibrations.
(1) Presentation of results. The characteristic motion vibrations may be used to verify that the flight simulator can reproduce the frequency content of the helicopter when flown in specific conditions. The test results should be presented as a Power Spectral Density (PSD) plot with frequencies on the horizontal axis and amplitude on the vertical axis. The helicopter data and flight simulator data should be presented in the same format with the same scaling. The algorithms used for generating the flight simulator data should be the same as those used for the helicopter data. If they are not the same then the algorithms used for the flight simulator data should be proven to be sufficiently comparable. As a minimum the results along the dominant axes should be presented and a rationale for not presenting the other axes should be provided.
(2) Interpretation of results. The overall trend of the PSD plot should be considered while focusing on the dominant frequencies. Less emphasis should be placed on the differences at the high frequency and low amplitude portions of the PSD plot. During the analysis, certain structural components of the flight simulator have resonant frequencies that are filtered and may not appear in the PSD plot. If filtering is required, the notch filter bandwidth should be limited to 1 Hz to ensure that the buffet feel is not adversely affected. In addition, a rationale should be provided to explain that the characteristic motion vibration is not being adversely affected by the filtering. The amplitude should match helicopter data as described below. However, if the PSD plot was altered for subjective reasons, a rationale should be provided to justify the change. If the plot is on a logarithmic scale it may be difficult to interpret the amplitude of the buffet in terms of acceleration. For example, a 1 × 10−3 g-rms2/Hz would describe a heavy buffet and may be seen in the deep stall regime. Alternatively, a 1 × 10−6 g-rms2/Hz buffet is almost imperceptable, but may represent a flap buffet at low speed. The previous two examples differ in magnitude by 1000. On a PSD plot this represents three decades (one decade is a change in order of magnitude of 10, and two decades is a change in order of magnitude of 100).
Note:
In the example, “g-rms2” is the mathematical expression for “g's root mean squared.”
f. Table C2B, Motion System Recommendations for Level C and Level D Helicopter Simulators, contains a description of the parameters that should be present in simulator motion systems to provide adequate onset motion cues to helicopter pilots. The information provided covers the six axes of motion (pitch, roll, yaw, vertical, lateral, and longitudinal) and addresses displacement, velocity, and acceleration. Also included is information about the parameters for initial rotational and linear acceleration. The parameters listed in this table apply only to Level C and Level D simulators, and are presented here as recommended targets for motion system capability. They are not requirements.
Table C2B—Motion System Recommendations for Level C and Level D Helicopter Simulators
a. | Motion System Envelope | |
a.1. | Pitch | |
a.1.a. | Displacement | ±25° |
a.1.b. | Velocity | ±20°/sec |
a.1.c. | Acceleration | ±100°/sec2 |
a.2. | Roll | |
a.2.a. | Displacement | ±25° |
a.2.b. | Velocity | ±20°/sec |
a.2.c. | Acceleration | ±100°/sec2 |
a.3. | Yaw | |
a.3.a. | Displacement | ±25° |
a.3.b. | Velocity— | ±20°/sec |
a.3.c. | Acceleration | ±100°/sec2 |
a.4. | Vertical | |
a.4.a. | Displacement | ±34 in. |
a.4.b. | Velocity | ±24 in. |
a.4.c. | Acceleration | ±0.8 g. |
a.5. | Lateral | |
a.5.a. | Displacement | ±45 in. |
a.5.b. | Velocity | ±28 in/sec. |
a.5.c. | Acceleration | ±0.6 g. |
a.6. | Longitudinal | |
a.6.a. | Displacement | ±34 in. |
a.6.b. | Velocity | ±28 in/sec. |
a.6.c. | Acceleration | ±0.6 g. |
a.7. | Initial Rotational Acceleration Ratio. | |
All axes 300°/ sec2/sec | ||
a.8. | Initial Linear Acceleration Ratio. | |
a.8.a. | Vertical | ±6g/sec |
a.8.b. | Lateral | ±3g/sec |
a.8.c. | Longitudinal | ±3g/sec |
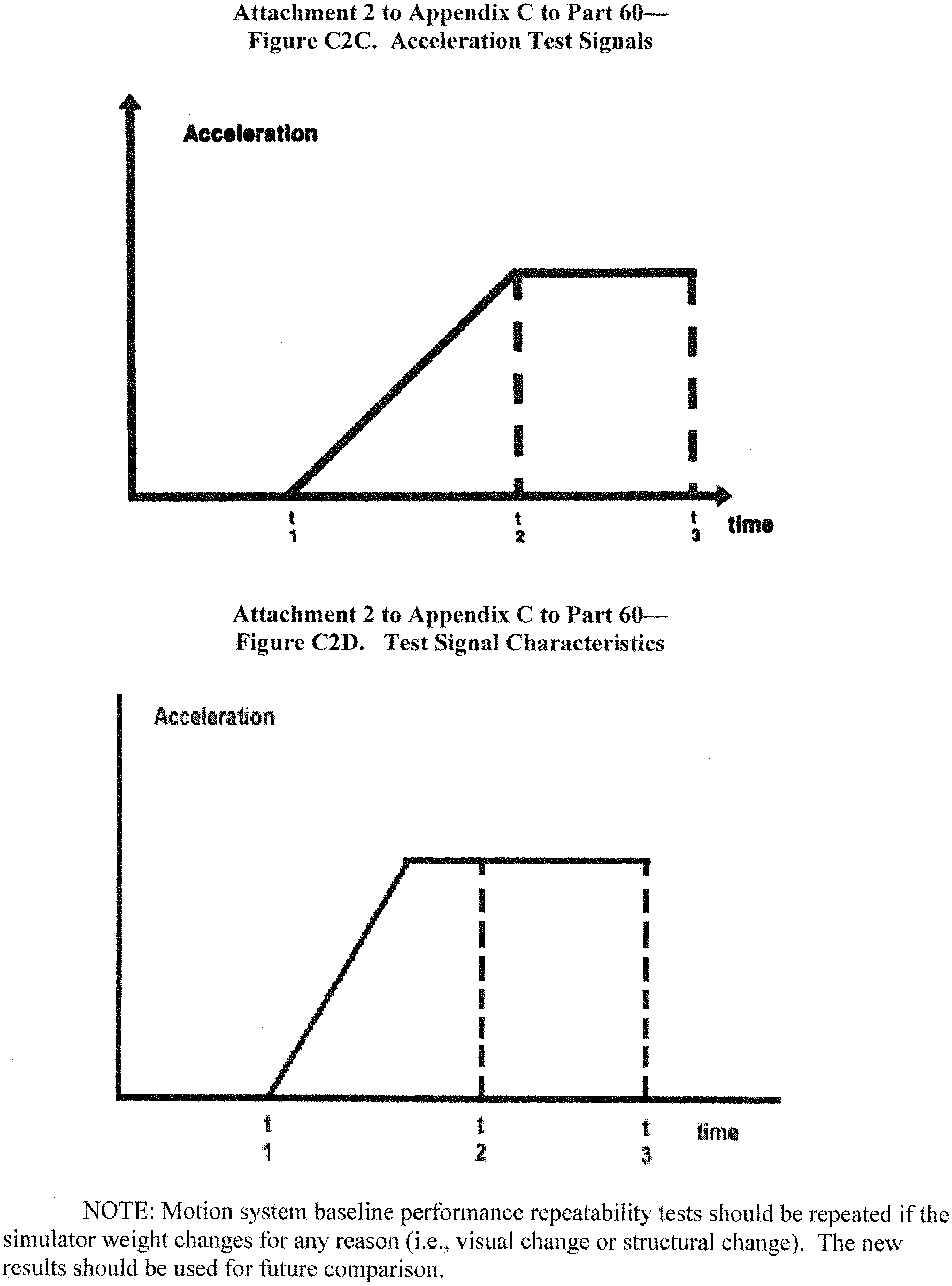
7. Sound System
a. General. The total sound environment in the helicopter is very complex, and changes with atmospheric conditions, helicopter configuration, airspeed, altitude, and power settings. Flight deck sounds are an important component of the flight deck operational environment and provide valuable information to the flight crew. These aural cues can either assist the crew (as an indication of an abnormal situation), or hinder the crew (as a distraction or nuisance). For effective training, the flight simulator should provide flight deck sounds that are perceptible to the pilot during normal and abnormal operations, and that are comparable to those of the helicopter. The flight simulator operator should carefully evaluate background noises in the location where the device will be installed. To demonstrate compliance with the sound requirements, the objective or validation tests in this attachment were selected to provide a representative sample of normal static conditions typically experienced by a pilot.
b. Alternate propulsion. For FFS with multiple propulsion configurations, any condition listed in Table C2A in this attachment should be presented for evaluation as part of the QTG if identified by the helicopter manufacturer or other data supplier as significantly different due to a change in propulsion system (engine or propeller).
c. Data and Data Collection System.
(1) Information provided to the flight simulator manufacturer should comply be presented in the format suggested by the “International Air Transport Association (IATA) Flight Simulator Design and Performance Data Requirements,” as amended. This information should contain calibration and frequency response data.
(2) The system used to perform the tests listed in Table C2A should comply with the following standards:
(a) The specifications for octave, half octave, and third octave band filter sets may be found in American National Standards Institute (ANSI) S1.11-1986.
(b) Measurement microphones should be type WS2 or better, as described in International Electrotechnical Commission (IEC) 1094-4-1995.
(3) Headsets. If headsets are used during normal operation of the helicopter they should also be used during the flight simulator evaluation.
(4) Playback equipment. Playback equipment and recordings of the QTG conditions should be provided during initial evaluations.
(5) Background noise.
(a) Background noise is the noise in the flight simulator that is not associated with the helicopter, but is caused by the flight simulator's cooling and hydraulic systems and extraneous noise from other locations in the building. Background noise can seriously impact the correct simulation of helicopter sounds, and should be kept below the helicopter sounds. In some cases, the sound level of the simulation can be increased to compensate for the background noise. However, this approach is limited by the specified tolerances and by the subjective acceptability of the sound environment to the evaluation pilot.
(b) The acceptability of the background noise levels is dependent upon the normal sound levels in the helicopter being represented. Background noise levels that fall below the lines defined by the following points, may be acceptable:
(i) 70 dB @ 50 Hz;
(ii) 55 dB @ 1000 Hz;
(iii) 30 dB @ 16 kHz.
(Note: These limits are for unweighted 1⁄3 octave band sound levels. Meeting these limits for background noise does not ensure an acceptable flight simulator. Helicopter sounds that fall below this limit require careful review and may require lower limits on background noise.)
(6) Validation testing. Deficiencies in helicopter recordings should be considered when applying the specified tolerances to ensure that the simulation is representative of the helicopter. Examples of typical deficiencies are:
(a) Variation of data between tail numbers.
(b) Frequency response of microphones.
(c) Repeatability of the measurements.
Table C2C—Example of Continuing Qualification Frequency Response Test Tolerance
Band center frequency | Initial results(dBSPL) | Continuing qualification results(dBSPL) | Absolutedifference |
|---|---|---|---|
50 | 75.0 | 73.8 | 1.2 |
63 | 75.9 | 75.6 | 0.3 |
80 | 77.1 | 76.5 | 0.6 |
100 | 78.0 | 78.3 | 0.3 |
125 | 81.9 | 81.3 | 0.6 |
160 | 79.8 | 80.1 | 0.3 |
200 | 83.1 | 84.9 | 1.8 |
250 | 78.6 | 78.9 | 0.3 |
315 | 79.5 | 78.3 | 1.2 |
400 | 80.1 | 79.5 | 0.9 |
500 | 80.7 | 79.8 | 0.9 |
630 | 81.9 | 80.4 | 1.5 |
800 | 73.2 | 74.1 | 0.9 |
1000 | 79.2 | 80.1 | 0.9 |
1250 | 80.7 | 82.8 | 2.1 |
1600 | 81.6 | 78.6 | 3.0 |
2000 | 76.2 | 74.4 | 1.8 |
2500 | 79.5 | 80.7 | 1.2 |
3150 | 80.1 | 77.1 | 3.0 |
4000 | 78.9 | 78.6 | 0.3 |
5000 | 80.1 | 77.1 | 3.0 |
6300 | 80.7 | 80.4 | 0.3 |
8000 | 84.3 | 85.5 | 1.2 |
10000 | 81.3 | 79.8 | 1.5 |
12500 | 80.7 | 80.1 | 0.6 |
16000 | 71.1 | 71.1 | 0.0 |
Average | 1.1 | ||
8. Additional Information About Flight Simulator Qualification for New or Derivative Helicopters
a. Typically, a helicopter manufacturer's approved final data for performance, handling qualities, systems or avionics is not available until well after a new or derivative helicopter has entered service. However, flight crew training and certification often begins several months prior to the entry of the first helicopter into service. Consequently, it may be necessary to use preliminary data provided by the helicopter manufacturer for interim qualification of flight simulators.
b. In these cases, the NSPM may accept certain partially validated preliminary helicopter and systems data, and early release (“red label”) avionics data in order to permit the necessary program schedule for training, certification, and service introduction.
c. Simulator sponsors seeking qualification based on preliminary data should consult the NSPM to make special arrangements for using preliminary data for flight simulator qualification. The sponsor should also consult the helicopter and flight simulator manufacturers to develop a data plan and flight simulator qualification plan.
d. The procedure to be followed to gain NSPM acceptance of preliminary data will vary from case to case and between helicopter manufacturers. Each helicopter manufacturer's new helicopter development and test program is designed to suit the needs of the particular project and may not contain the same events or sequence of events as another manufacturer's program or even the same manufacturer's program for a different helicopter. Therefore, there cannot be a prescribed invariable procedure for acceptance of preliminary data; instead there should be a statement describing the final sequence of events, data sources, and validation procedures agreed by the simulator sponsor, the helicopter manufacturer, the flight simulator manufacturer, and the NSPM.
Note:
A description of helicopter manufacturer-provided data needed for flight simulator modeling and validation is to be found in the “Royal Aeronautical Society Data Package Requirements for Design and Performance Evaluation of Rotary Wing Synthetic Training Devices.”
e. The preliminary data should be the manufacturer's best representation of the helicopter, with assurance that the final data will not deviate significantly from the preliminary estimates. Data derived from these predictive or preliminary techniques should be validated by available sources including, at least, the following:
(1) Manufacturer's engineering report. The report should explain the predictive method used and illustrate past success of the method on similar projects. For example, the manufacturer could show the application of the method to an earlier helicopter model or predict the characteristics of an earlier model and compare the results to final data for that model.
(2) Early flight test results. This data is often derived from helicopter certification tests and should be used to maximum advantage for early flight simulator validation. Certain critical tests that would normally be done early in the helicopter certification program should be included to validate essential pilot training and certification maneuvers. These tests include cases where a pilot is expected to cope with a helicopter failure mode or an engine failure. The early data available will depend on the helicopter manufacturer's flight test program design and may not be the same in each case. The flight test program of the helicopter manufacturer should include provisions for generation of very early flight tests results for flight simulator validation.
f. The use of preliminary data is not indefinite. The helicopter manufacturer's final data should be available within 12 months after the helicopter first entry into service or as agreed by the NSPM, the simulator sponsor, and the helicopter manufacturer. When applying for interim qualification using preliminary data, the simulator sponsor and the NSPM should agree on the update program. This includes specifying that the final data update will be installed in the flight simulator within a period of 12 months following the final data release, unless special conditions exist and a different schedule is acceptable. The flight simulator performance and handling validation would then be based on data derived from flight tests. Initial helicopter systems data should be updated after engineering tests. Final helicopter systems data should also be used for flight simulator programming and validation.
g. Flight simulator avionics should stay essentially in step with helicopter avionics (hardware and software) updates. The permitted time lapse between helicopter and flight simulator updates should be minimal. It may depend on the magnitude of the update and whether the QTG and pilot training and certification are affected. Differences in helicopter and flight simulator avionics versions and the resulting effects on flight simulator qualification should be agreed between the simulator sponsor and the NSPM. Consultation with the flight simulator manufacturer is desirable throughout the qualification process.
h. The following describes an example of the design data and sources that might be used in the development of an interim qualification plan.
(1) The plan should consist of the development of a QTG based upon a mix of flight test and engineering simulation data. For data collected from specific helicopter flight tests or other flights the required design model or data changes necessary to support an acceptable Proof of Match (POM) should be generated by the helicopter manufacturer.
(2) For proper validation of the two sets of data, the helicopter manufacturer should compare their simulation model responses against the flight test data, when driven by the same control inputs and subjected to the same atmospheric conditions as recorded in the flight test. The model responses should result from a simulation where the following systems are run in an integrated fashion and are consistent with the design data released to the flight simulator manufacturer:
(a) Propulsion.
(b) Aerodynamics.
(c) Mass properties.
(d) Flight controls.
(e) Stability augmentation.
(f) Brakes/landing gear.
i. A qualified test pilot should be used to assess handling qualities and performance evaluations for the qualification of flight simulators of new helicopter types.
End Information
Begin QPS Requirement
9. Engineering Simulator—Validation Data
a. When a fully validated simulation (i.e., validated with flight test results) is modified due to changes to the simulated helicopter configuration, the helicopter manufacturer or other acceptable data supplier must coordinate with the NSPM to supply validation data from an “audited” engineering simulator/simulation to selectively supplement flight test data. The NSPM must be provided an opportunity to audit the use of the engineering simulation or the engineering simulator during the acquisition of the data that will be used as validation data. Audited data may be used for changes that are incremental in nature. Manufacturers or other data suppliers must be able to demonstrate that the predicted changes in helicopter performance are based on acceptable aeronautical principles with proven success history and valid outcomes. This must include comparisons of predicted and flight test validated data.
b. Helicopter manufacturers or other acceptable data suppliers seeking to use an engineering simulator for simulation validation data as an alternative to flight-test derived validation data, must contact the NSPM and provide the following:
(1) A description of the proposed aircraft changes, a description of the proposed simulation model changes, and the use of an integral configuration management process, including an audit of the actual simulation model modifications that includes a step-by-step description leading from the original model(s) to the current model(s).
(2) A schedule for review by the NSPM of the proposed plan and the subsequent validation data to establish acceptability of the proposal.
(3) Validation data from an audited engineering simulator/simulation to supplement specific segments of the flight test data.
c. To be qualified to supply engineering simulator validation data, for aerodynamic, engine, flight control, or ground handling models, a helicopter manufacturer or other acceptable data supplier must:
(1) Be able to verify their ability to:
(a) Develop and implement high fidelity simulation models; and
(b) Predict the handling and performance characteristics of a helicopter with sufficient accuracy to avoid additional flight test activities for those handling and performance characteristics.
(2) Have an engineering simulator that:
(a) Is a physical entity, complete with a flight deck representative of the simulated class of helicopter;
(b) Has controls sufficient for manual flight;
(c) Has models that run in an integrated manner;
(d) Had fully flight-test validated simulation models as the original or baseline simulation models;
(e) Has an out-of-the-flight deck visual system;
(f) Has actual avionics boxes interchangeable with the equivalent software simulations to support validation of released software;
(g) Uses the same models as released to the training community (which are also used to produce stand-alone proof-of-match and checkout documents);
(h) Is used to support helicopter development and certification; and
(i) Has been found to be a high fidelity representation of the helicopter by the manufacturer's pilots (or other acceptable data supplier), certificate holders, and the NSPM.
(3) Use the engineering simulator to produce a representative set of integrated proof-of-match cases.
(4) Use a configuration control system covering hardware and software for the operating components of the engineering simulator.
(5) Demonstrate that the predicted effects of the change(s) are within the provisions of sub-paragraph “a” of this section, and confirm that additional flight test data are not required.
d. Additional Requirements for Validation Data
(1) When used to provide validation data, an engineering simulator must meet the simulator standards currently applicable to training simulators except for the data package.
(2) The data package used must be:
(a) Comprised of the engineering predictions derived from the helicopter design, development, or certification process;
(b) Based on acceptable aeronautical principles with proven success history and valid outcomes for aerodynamics, engine operations, avionics operations, flight control applications, or ground handling;
(c) Verified with existing flight-test data; and
(d) Applicable to the configuration of a production helicopter, as opposed to a flight-test helicopter.
(3) Where engineering simulator data are used as part of a QTG, an essential match must exist between the training simulator and the validation data.
(4) Training flight simulator(s) using these baseline and modified simulation models must be qualified to at least internationally recognized standards, such as contained in the ICAO Document 9625, the “Manual of Criteria for the Qualification of Flight Simulators.”
End QPS Requirement
10. [Reserved]
11. Validation Test Tolerances
Begin Information
a. Non-Flight-Test Tolerances. If engineering simulator data or other non-flight-test data are used as an allowable form of reference validation data for the objective tests listed in Table C2A of this attachment, the data provider must supply a well-documented mathematical model and testing procedure that enables a replication of the engineering simulation results within 20% of the corresponding flight test tolerances.
b. Background
(1) The tolerances listed in Table C2A of this attachment are designed to measure the quality of the match using flight-test data as a reference.
(2) Good engineering judgment should be applied to all tolerances in any test. A test is failed when the results fall outside of the prescribed tolerance(s).
(3) Engineering simulator data are acceptable because the same simulation models used to produce the reference data are also used to test the flight training simulator (i.e., the two sets of results should be “essentially” similar).
(4) The results from the two sources may differ for the following reasons:
(a) Hardware (avionics units and flight controls);
(b) Iteration rates;
(c) Execution order;
(d) Integration methods;
(e) Processor architecture;
(f) Digital drift, including:
(i) Interpolation methods;
(ii) Data handling differences;
(iii) Auto-test trim tolerances.
(5) The tolerance limit between the reference data and the flight simulator results is generally 20% of the corresponding “flight-test” tolerances. However, there may be cases where the simulator models used are of higher fidelity, or the manner in which they are cascaded in the integrated testing loop have the effect of a higher fidelity, than those supplied by the data provider. Under these circumstances, it is possible that an error greater than 20% may be generated. An error greater than 20% may be acceptable if the simulator sponsor can provide an adequate explanation.
(6) Guidelines are needed for the application of tolerances to engineering-simulator-generated validation data because:
(a) Flight-test data are often not available due to sound technical reasons;
(b) Alternative technical solutions are being advanced; and
(c) The costs are high.
12. Validation Data Roadmap
a. Helicopter manufacturers or other data suppliers should supply a validation data roadmap (VDR) document as part of the data package. A VDR document contains guidance material from the helicopter validation data supplier recommending the best possible sources of data to be used as validation data in the QTG. A VDR is of special value when requesting interim qualification, qualification of simulators for helicopters certificated prior to 1992, and qualification of alternate engine or avionics fits. A sponsor seeking to have a device qualified in accordance with the standards contained in this QPS appendix should submit a VDR to the NSPM as early as possible in the planning stages. The NSPM is the final authority to approve the data to be used as validation material for the QTG. The NSPM and the Joint Aviation Authorities' Synthetic Training Devices Advisory Board have committed to maintain a list of agreed VDRs.
b. The VDR should identify (in matrix format) sources of data for all required tests. It should also provide guidance regarding the validity of these data for a specific engine type, thrust rating configuration, and the revision levels of all avionics affecting helicopter handling qualities and performance. The VDR should include rationale or explanation in cases where data or parameters are missing, engineering simulation data are to be used, flight test methods require explanation, or where there is any deviation from data requirements. Additionally, the document should refer to other appropriate sources of validation data (e.g., sound and vibration data documents).
c. The Sample Validation Data Roadmap (VDR) for helicopters, shown in Table C2D, depicts a generic roadmap matrix identifying sources of validation data for an abbreviated list of tests. This sample document uses fixed wing parameters instead of helicopter values. It is merely a sample and does not provide actual data. A complete matrix should address all test conditions for helicopter application and provide actual data and data sources.
d. Two examples of rationale pages are presented in Appendix F of IATA Flight Simulator Design and Performance Data Requirements document. These illustrate the type of helicopter and avionics configuration information and descriptive engineering rationale used to describe data anomalies or provide an acceptable basis for using alternative data for QTG validation requirements.
End Information
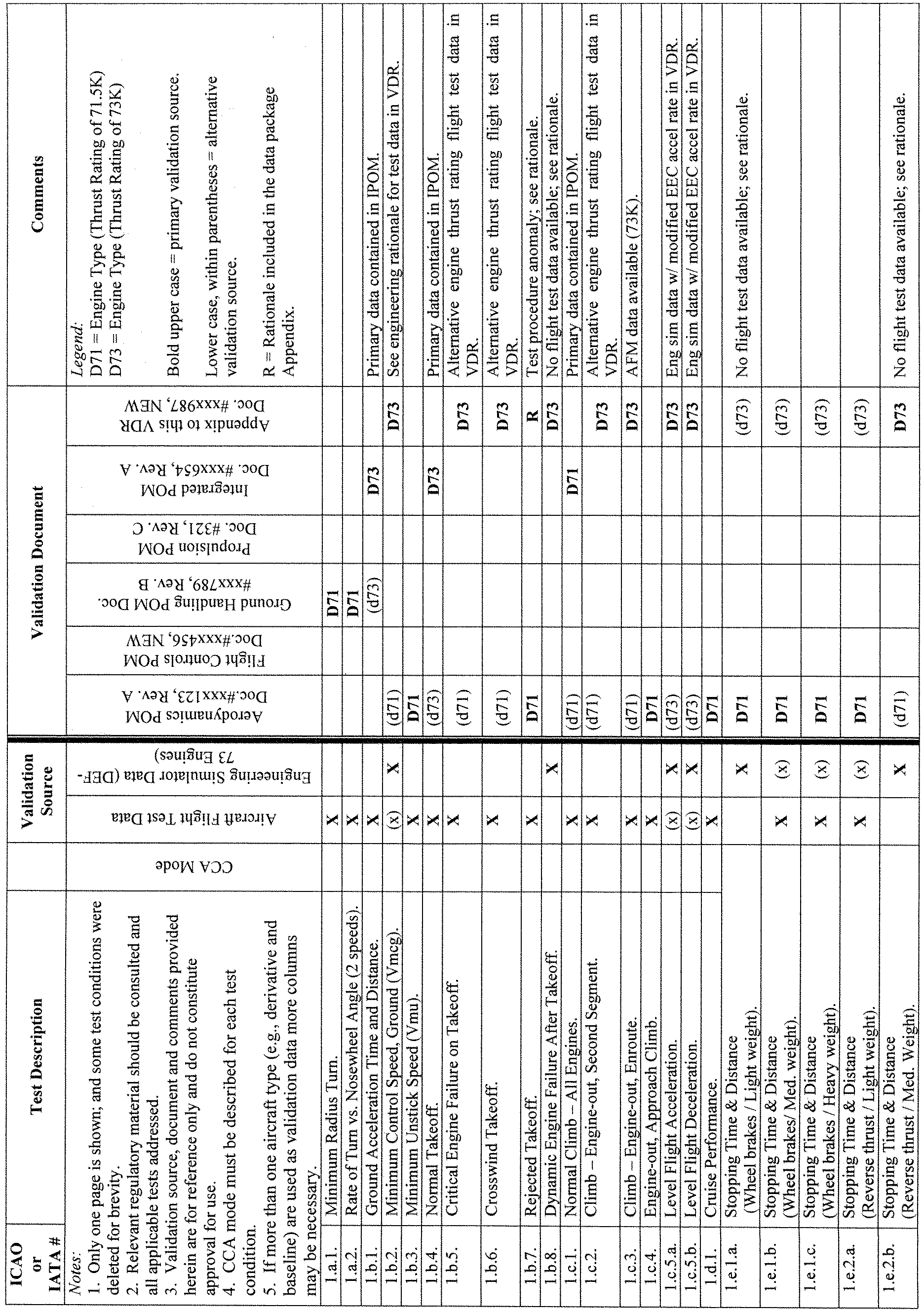
Begin Information
13. [Reserved]
14. Acceptance Guidelines for Alternative Avionics (Flight-Related Computers and Controllers)
a. Background
(1) For a new helicopter type, the majority of flight validation data are collected on the first helicopter configuration with a “baseline” flight-related avionics ship-set; (see subparagraph b.(2) of this section). These data are then used to validate all flight simulators representing that helicopter type.
(2) Additional validation data may be needed for flight simulators representing a helicopter with avionics of a different hardware design than the baseline, or a different software revision than that of previously validated configurations.
(3) When a flight simulator with additional or alternate avionics configurations is to be qualified, the QTG should contain tests against validation data for selected cases where avionics differences are expected to be significant.
b. Approval Guidelines For Validating Alternate Avionics
(1) The following guidelines apply to flight simulators representing helicopters with a revised avionics configuration, or more than one avionics configuration.
(2) The baseline validation data should be based on flight test data, except where other data are specifically allowed (e.g., engineering flight simulator data).
(3) The helicopter avionics can be segmented into two groups, systems or components whose functional behavior contributes to the aircraft response presented in the QTG results, and systems that do not. The following avionics are examples of contributory systems for which hardware design changes or software revisions may lead to significant differences in the aircraft response relative to the baseline avionics configuration: Flight control computers and controllers for engines, autopilot, braking system, and nosewheel steering system, if applicable. Related avionics such as augmentation systems should also be considered.
(4) The acceptability of validation data used in the QTG for an alternative avionics fit should be determined as follows:
(a) For changes to an avionics system or component that do not affect QTG validation test response, the QTG test can be based on validation data from the previously validated avionics configuration.
(b) For an avionics change to a contributory system, where a specific test is not affected by the change (e.g., the avionics change is a Built In Test Equipment (BITE) update or a modification in a different flight phase), the QTG test can be based on validation data from the previously-validated avionics configuration. The QTG should include authoritative justification (e.g., from the helicopter manufacturer or system supplier) that this avionics change does not affect the test.
(c) For an avionics change to a contributory system, the QTG may be based on validation data from the previously-validated avionics configuration if no new functionality is added and the impact of the avionics change on the helicopter response is based on acceptable aeronautical principles with proven success history and valid outcomes. This should be supplemented with avionics-specific validation data from the helicopter manufacturer's engineering simulation, generated with the revised avionics configuration. The QTG should include an explanation of the nature of the change and its effect on the helicopter response.
(d) For an avionics change to a contributory system that significantly affects some tests in the QTG, or where new functionality is added, the QTG should be based on validation data from the previously validated avionics configuration and supplemental avionics-specific flight test data sufficient to validate the alternate avionics revision. Additional flight test validation data may not be needed if the avionics changes were certified without the need for testing with a comprehensive flight instrumentation package. The helicopter manufacturer should coordinate flight simulator data requirements in advance with the NSPM.
(5) A matrix or “roadmap” should be provided with the QTG indicating the appropriate validation data source for each test. The roadmap should include identification of the revision state of those contributory avionics systems that could affect specific test responses.
15. Transport Delay Testing
a. This paragraph describes how to determine the introduced transport delay through the flight simulator system so that it does not exceed a specific time delay. The transport delay should be measured from control inputs through the interface, through each of the host computer modules and back through the interface to motion, flight instrument, and visual systems. The transport delay should not exceed the maximum allowable interval.
b. Four specific examples of transport delay are:
(1) Simulation of classic non-computer controlled aircraft;
(2) Simulation of Computer Controlled Aircraft using real helicopter black boxes;
(3) Simulation of Computer Controlled Aircraft using software emulation of helicopter boxes;
(4) Simulation using software avionics or rehosted instruments.
c. Figure C2C illustrates the total transport delay for a non-computer-controlled helicopter or the classic transport delay test. Since there are no helicopter-induced delays for this case, the total transport delay is equivalent to the introduced delay.
d. Figure C2D illustrates the transport delay testing method using the real helicopter controller system.
e. To obtain the induced transport delay for the motion, instrument and visual signal, the delay induced by the helicopter controller should be subtracted from the total transport delay. This difference represents the introduced delay and should not exceed the standards prescribed in Table C1A.
f. Introduced transport delay is measured from the flight deck control input to the reaction of the instruments and motion and visual systems (See Figure C2C).
g. The control input may also be introduced after the helicopter controller system input and the introduced transport delay may be measured directly from the control input to the reaction of the instruments, and simulator motion and visual systems (See Figure C2D).
h. Figure C2E illustrates the transport delay testing method used on a flight simulator that uses a software emulated helicopter controller system.
i. It is not possible to measure the introduced transport delay using the simulated helicopter controller system architecture for the pitch, roll and yaw axes. Therefore, the signal should be measured directly from the pilot controller. The flight simulator manufacturer should measure the total transport delay and subtract the inherent delay of the actual helicopter components because the real helicopter controller system has an inherent delay provided by the helicopter manufacturer. The flight simulator manufacturer should ensure that the introduced delay does not exceed the standards prescribed in Table C1A.
j. Special measurements for instrument signals for flight simulators using a real helicopter instrument display system instead of a simulated or re-hosted display. For flight instrument systems, the total transport delay should be measured and the inherent delay of the actual helicopter components subtracted to ensure that the introduced delay does not exceed the standards prescribed in Table C1A.
(1) Figure C2FA illustrates the transport delay procedure without helicopter display simulation. The introduced delay consists of the delay between the control movement and the instrument change on the data bus.
(2) Figure C2FB illustrates the modified testing method required to measure introduced delay due to software avionics or re-hosted instruments. The total simulated instrument transport delay is measured and the helicopter delay should be subtracted from this total. This difference represents the introduced delay and should not exceed the standards prescribed in Table C1A. The inherent delay of the helicopter between the data bus and the displays is indicated in figure C2FA. The display manufacturer should provide this delay time.
k. Recorded signals. The signals recorded to conduct the transport delay calculations should be explained on a schematic block diagram. The flight simulator manufacturer should also provide an explanation of why each signal was selected and how they relate to the above descriptions.
l. Interpretation of results. Flight simulator results vary over time from test to test due to “sampling uncertainty.” All flight simulators run at a specific rate where all modules are executed sequentially in the host computer. The flight controls input can occur at any time in the iteration, but these data will not be processed before the start of the new iteration. For example, a flight simulator running at 60 Hz may have a difference of as much as 16.67 msec between results. This does not mean that the test has failed. Instead, the difference is attributed to variation in input processing. In some conditions, the host simulator and the visual system do not run at the same iteration rate, so the output of the host computer to the visual system will not always be synchronized.
m. The transport delay test should account for both daylight and night modes of operation of the visual system. In both cases, the tolerances prescribed in Table C1A should be met and the motion response should occur before the end of the first video scan containing new information.
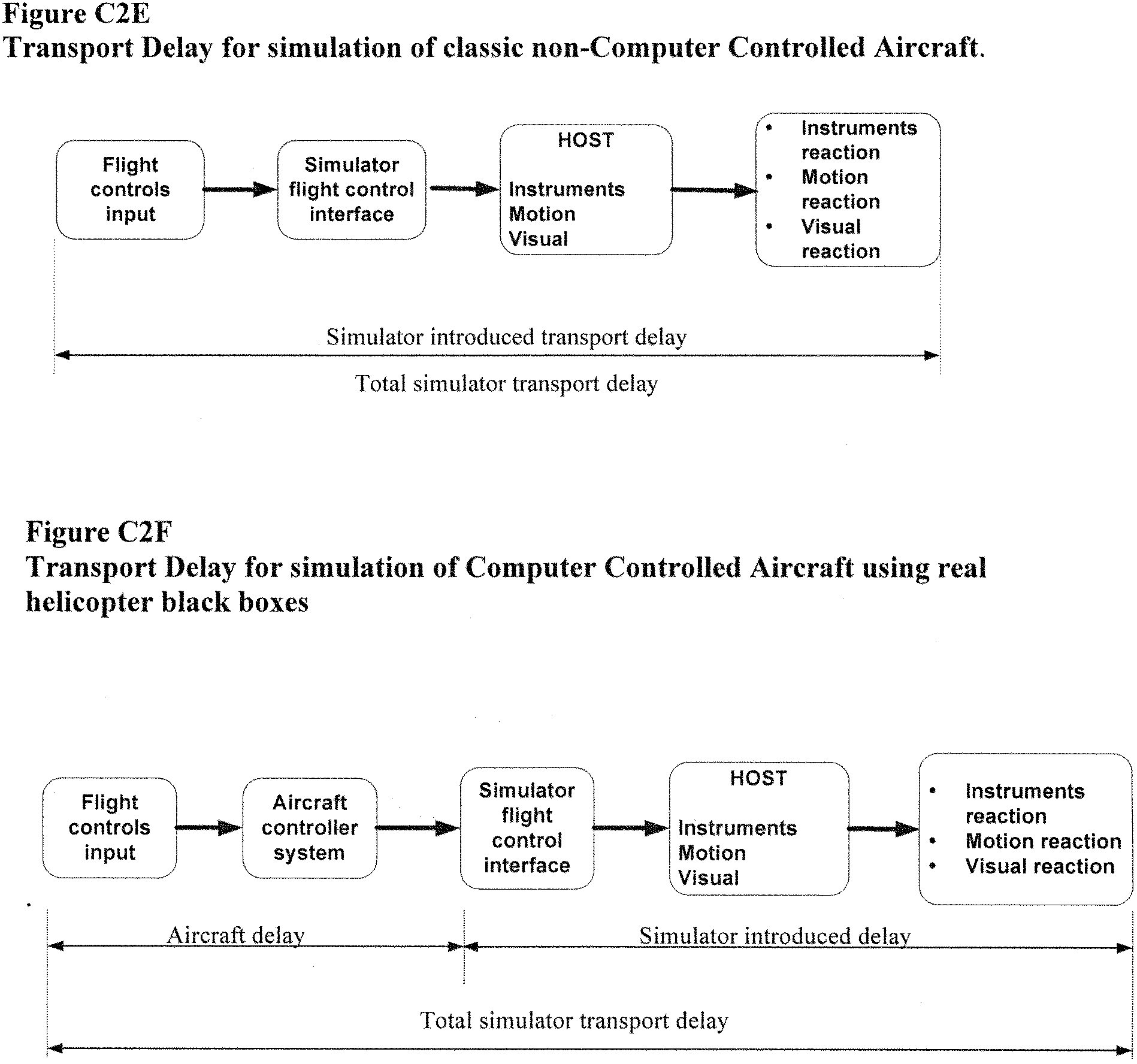
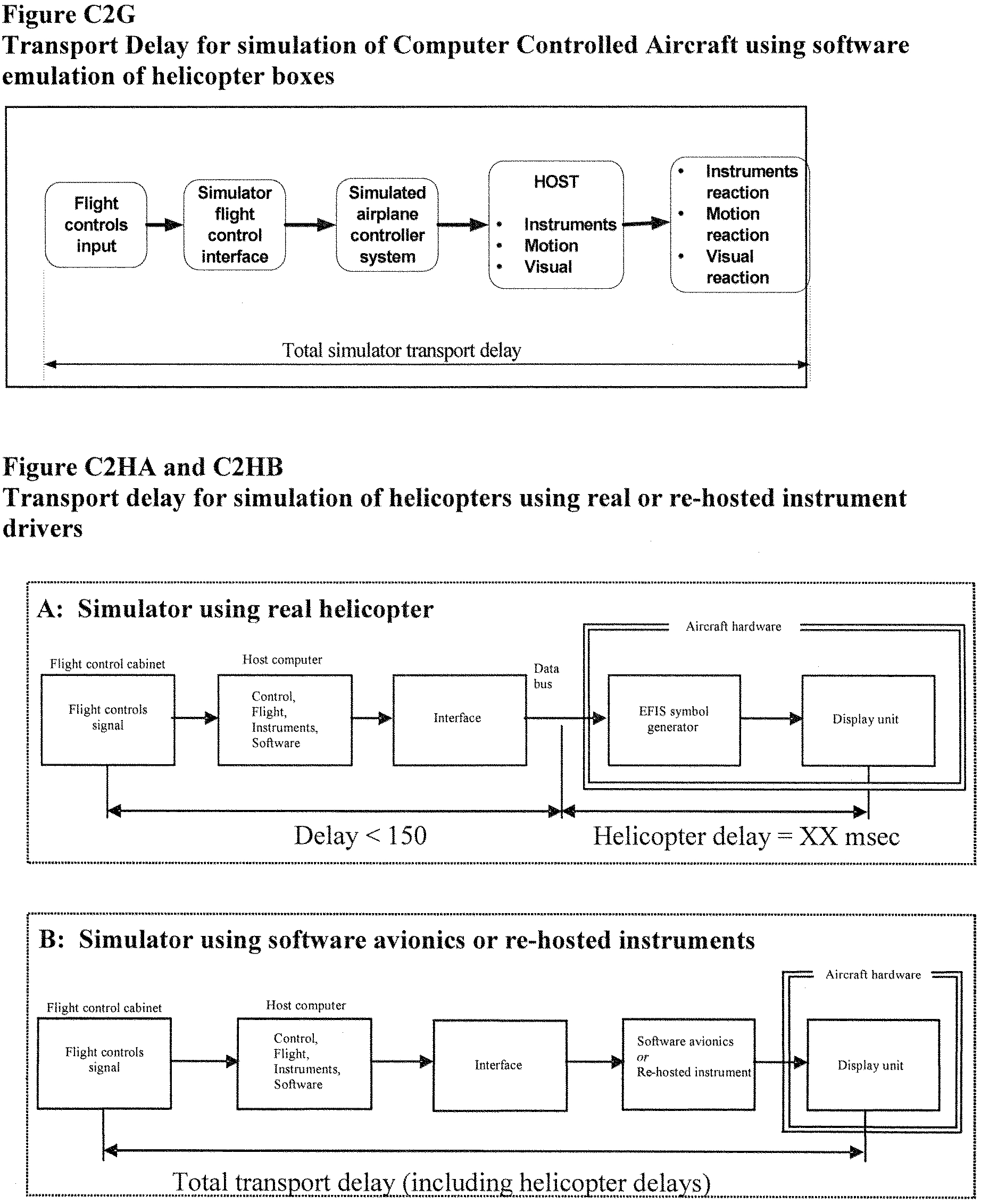
16. Continuing Qualification Evaluations—Validation Test Data Presentation
a. Background
(1) The MQTG is created during the initial evaluation of a flight simulator. This is the master document, as amended, to which flight simulator continuing qualification evaluation test results are compared.
(2) The currently accepted method of presenting continuing qualification evaluation test results is to provide flight simulator results over-plotted with reference data. Test results are carefully reviewed to determine if the test is within the specified tolerances. This can be a time consuming process, particularly when reference data exhibits rapid variations or an apparent anomaly requiring engineering judgment in the application of the tolerances. In these cases, the solution is to compare the results to the MQTG. The continuing qualification results are compared to the results in the MQTG for acceptance. The flight simulator operator and the NSPM should look for any change in the flight simulator performance since initial qualification.
b. Continuing Qualification Evaluation Test Results Presentation
(1) Flight simulator operators are encouraged to over-plot continuing qualification validation test results with MQTG flight simulator results recorded during the initial evaluation and as amended. Any change in a validation test will be readily apparent. In addition to plotting continuing qualification validation test and MQTG results, operators may elect to plot reference data.
(2) There are no suggested tolerances between flight simulator continuing qualification and MQTG validation test results. Investigation of any discrepancy between the MQTG and continuing qualification flight simulator performance is left to the discretion of the flight simulator operator and the NSPM.
(3) Differences between the two sets of results, other than variations attributable to repeatability issues that cannot be explained should be investigated.
(4) The flight simulator should retain the ability to over-plot both automatic and manual validation test results with reference data.
End Information
Begin QPS Requirements
17. Alternative Data Sources, Procedures, and Instrumentation: Level B Simulators Only
a. Sponsors are not required to use the alternative data sources, procedures, and instrumentation. However, any sponsor choosing to use alternative sources must comply with the requirements in Table C2E.
End QPS Requirements
Begin Information
b. It has become standard practice for experienced simulator manufacturers to use such techniques as a means of establishing data bases for new simulator configurations while awaiting the availability of actual flight test data. The data generated from the aerodynamic modeling techniques is then compared to the flight test data when it becomes available. The results of such comparisons have become increasingly consistent, indicating that these techniques, applied with appropriate experience, are dependable and accurate for the development of aerodynamic models for use in Level B simulators.
c. Based on this history of successful comparisons, the NSPM has concluded that those who are experienced in the development of aerodynamic models for simulator application can successfully use these modeling techniques to alter the method for acquiring flight test data for Level B simulators.
d. The information in Table C2E (Alternative Data Sources, Procedures, and Information) is presented to describe an acceptable alternative to data sources for simulator modeling and validation and an acceptable alternative to the procedures and instrumentation traditionally used to gather such modeling and validation data.
(1) Alternative data sources that may be used for part or all of a data requirement are the Helicopter Maintenance Manual, the Rotorcraft Flight Manual (RFM), Helicopter Design Data, the Type Inspection Report (TIR), Certification Data or acceptable supplemental flight test data.
(2) The sponsor should coordinate with the NSPM prior to using alternative data sources in a flight test or data gathering effort.
e. The NSPM position on the use of these alternative data sources, procedures, and instrumentation is based on the use of a rigorously defined and fully mature simulation controls system model that includes accurate gearing and cable stretch characteristics (where applicable), determined from actual aircraft measurements. The model does not require control surface position measurements in the flight test objective data in these limited applications.
f. Data may be acquired by using an inertial measurement system and a synchronized video of the calibrated helicopter instruments, including the inclinometer; the force/position measurements of flight deck controls; and a clear visual directional reference for a known magnetic bearing (e.g., a runway centerline). Ground track and wind corrected heading may be used for sideslip angle.
g. The sponsor is urged to contact the NSPM for clarification of any issue regarding helicopters with reversible control systems. This table is not applicable to Computer Controlled Aircraft flight simulators.
h. Use of these alternate data sources, procedures, and instrumentation does not relieve the sponsor from compliance with the balance of the information contained in this document relative to Level B FFSs.
i. The term “inertial measurement system” is used in table C2E includes the use of a functional global positioning system (GPS).
j. Synchronized video for the use of alternative data sources, procedures, and instrumentation should have:
(1) sufficient resolution to allow magnification of the display to make appropriate measurement and comparisons; and
(2) sufficient size and incremental marking to allow similar measurement and comparison. The detail provided by the video should provide sufficient clarity and accuracy to measure the necessary parameter(s) to at least 1⁄2 of the tolerance authorized for the specific test being conducted and allow an integration of the parameter(s) in question to obtain a rate of change.
End Information
Table C2E—Alternative Data Sources, Procedures, and Instrumentation
QPS requirements | Information | ||
|---|---|---|---|
Table of objective tests | Level By only | Alternative data sources, procedures, and instrumentation | Notes |
Test entry number and title | |||
1.a.1.a. Performance. Engine Start and Accelerations | X | Data may be acquired using a synchronized video recording of all engine instruments, start buttons, means for fuel introduction and means for moving from “idle” to “flight.” A stopwatch is necessary | |
1.a.1.b. Performance. Steady State Idle and Operating RPM Conditions | X | Data may be acquired using a synchronized video recording of all engine instruments, and include the status of the means for moving from “idle” to “flight.” | |
1.a.2. Performance. Power Turbine Speed Trim | X | Data may be acquired using a synchronized video recording of all engine instruments. Speed trim actuator position may be hand recorded | |
1.a.3. Performance. Engine and Rotor Speed Governing | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.b.1. Performance. On Surface Taxi. Minimum Radius Turn | X | TIR, AFM, or Design data may be used | |
1.b.2. Performance. On Surface Taxi Rate of Turn vs. Nosewheel Steering Angle | X | Data may be acquired by using a constant tiller position (measured with a protractor), or full pedal application for steady state turn, and synchronized video of heading indicator. If less than full pedal is used, pedal position must be recorded | A single procedure may not be adequate for all rotorcraft steering systems. Appropriate measurement procedures must be devised and proposed for NSPM concurrence. |
1.b.3. Performance. Taxi | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.b.4. Performance. Brake | X | Data may be acquired using a stopwatch and a means for measuring distance such as runway distance markers conforming with runway distance marker standards | |
1.c.1. Performance. Running Takeoff | X | Preliminary certification data may be used. Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls. Collective, cyclic, and pedal position time history must be recorded from the start of collective movement through to normal climb. Indicated torque settings may be hand recorded at the moment of lift-off and in a steady normal climb | |
1.c.2. Performance. One Engine Inoperative (OEI), continued takeoff | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls. Collective, cyclic, and pedal position time history must be recorded from the start of collective movement through to normal OEI climb. Indicated torque settings may be hand recorded at the moment of lift-off and in a steady normal OEI climb | |
1.f. Performance. Level Flight. Trimmed Flight Control Positions | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.g. Performance. Normal Climb. Trimmed Flight Control Positions | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.h.1. Descent Performance and Trimmed Flight Control Positions | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.h.2. Autorotation Performance and Trimmed Flight Control Positions | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.j.1. Performance. Running Landing All Engines | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.j.2. Performance. Running Landing One Engine Inoperative | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
1.j.3. Performance. Balked Landing | X | Data may be acquired by using a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls. The synchronized video must record the time of the “balk landing” decision | |
2.a.1. Handling Qualities. Static Control Checks. Cyclic Controller Position vs. Force | X | Control positions can be obtained using continuous control position recordings. Force data may be acquired by using a hand held force gauge so that the forces can be cross-plotted against control position in each of the control axes | |
2.a.2. Handling Qualities. Static Control Checks. Collective/Pedals vs. Force | X | Control positions can be obtained using continuous control position recordings. Force data may be acquired by using a hand held force gauge so that the forces can be cross-plotted against control position in each of the control axes | |
2.a.3. Handling Qualities. Brake Pedal Force vs. Position | X | Brake pedal positions can be obtained using continuous position recordings. Force data may be acquired by using a hand held force gauge so that the forces can be cross-plotted against brake pedal position | |
2.a.4. Handling Qualities. Trim System Rate (all applicable systems) | X | Control positions can be obtained using continuous control position recordings plotted against time to provide rate in each applicable system | |
2.a.6. Handling Qualities. Control System Freeplay | X | Data may be acquired by direct measurement | |
2.c.1. Longitudinal Handling Qualities. Control Response | X | Data may be acquired by using an inertial measurement system, a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
2.c.2. Longitudinal Handling Qualities. Static Stability | X | Data may be acquired by using an inertial measurement system, a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
2.c.3.a. Longitudinal Handling Qualities. Dynamic Stability, Long Term Response | X | Data may be acquired by using an inertial measurement system, a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
2.c.3.b. Longitudinal Handling Qualities. Dynamic Stability, Short Term Response | X | Data may be acquired by using an inertial measurement system, a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
2.c.4. Longitudinal Handling Qualities. Maneuvering stability | X | Data may be acquired by using an inertial measurement system, a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
2.d.1.a. Lateral Handling Qualities. Control Response | X | Data may be acquired by using an inertial measurement system, a synchronized video of the calibrated helicopter instruments and the force/position measurements of flight deck controls | |
2.d.1.b Directional Handling Qualities. Control Response. | X | Data may be acquired by using an inertial measurement system and a synchronized video of calibrated helicopter instruments and force/position measurements of flight deck directional controls | |
2.d.2. Handling Qualities. Directional Static Stability | X | Data may be acquired by using an inertial measurement system and a synchronized video of calibrated helicopter instruments and force/position measurements of flight deck directional controls | |
2.d.3.a. Handling Qualities. Dynamic Lateral and Directional Stability Lateral-Directional Oscillations | X | Data may be acquired by using an inertial measurement system and a synchronized video of the calibrated helicopter instruments, the force/position measurements of flight deck controls, and a stop watch | |
2.d.3.b. Handling Qualities. Dynamic Lateral and Directional Stability Spiral Stability | X | Data may be acquired by using an inertial measurement system and a synchronized video of the calibrated helicopter instruments, the force/position measurements of flight deck controls, and a stop watch | |
2.d.3.c. Handling Qualities. Dynamic Lateral and Directional Stability. Adverse/Proverse Yaw | X | Data may be acquired by using an inertial measurement system and a synchronized video of the calibrated helicopter instruments, the force/position measurements of flight deck controls | |
Begin Information
18. Visual Display Systems.
a. Basic principles of a FFS collimated display:
(1) The essential feature of a collimated display is that light rays coming from a given point in a picture are parallel. There are two main implications of the parallel rays:
(a) The viewer's eyes focus at infinity and have zero convergence, providing a cue that the object is distant; and
(b) The angle to any given point in the picture does not change when viewed from a different position so the object behaves geometrically as though it were located at a significant distance from the viewer. These cues are self-consistent, and are appropriate for any object that has been modeled as being at a significant distance from the viewer.
(2) In an ideal situation the rays are perfectly parallel, but most implementations provide only an approximation to the ideal. Typically, an FFS display provides an image located not closer than about 20-33 ft (6-10 m) from the viewer, with the distance varying over the field-of-view. A schematic representation of a collimated display is provided in Figure C2A.
(3) Collimated displays are well suited to many simulation applications as the area of interest is relatively distant from the observer so the angles to objects should remain independent of viewing position. Consider the view of the runway seen by the flight crew lined up on an approach. In the real world, the runway is distant and the light rays from the runway to the eyes are parallel. The runway appears to be straight ahead to both crew members. This situation is well simulated by a collimated display and is presented in Figure C2B. Note that the distance to the runway has been shortened for clarity. If drawn to scale, the runway would be farther away and the rays from the two seats would be closer to being parallel.
(4) While the horizontal field-of-view of a collimated display can be extended to approximately 210°-220°, the vertical field-of-view has been limited to about 40°-45°. These limitations result from tradeoffs in optical quality and interference between the display components and flight deck structures, but were sufficient to meet FFS regulatory approval for Helicopter FFSs. However, recent designs have been introduced with vertical fields of view of up to 60° for helicopter applications.
b. Basic principles of a FFS dome (or non-collimated) display:
(1) The situation in a dome display is shown in Figure C2C. As the angles can be correct for only one eye point at a time, the visual system in the figure has been aligned for the right seat eye point position. The runway appears to be straight ahead of the aircraft for this viewer. For the left seat viewer, however, the runway appears to be somewhat to the right of the aircraft. As the aircraft is still moving towards the runway, the perceived velocity vector will be directed towards the runway and this will be interpreted as the aircraft having some yaw offset.
(2) The situation is substantially different for near field objects encountered in helicopter operations close to the ground. In those cases, objects that should be interpreted as being close to the viewer will be misinterpreted as being distant in a collimated display. The errors can actually be reduced in a dome display.
(3) The field-of-view possible with a dome display can be larger than that of a collimated display. Depending on the configuration, a field-of-view of 240° by 90° is possible and can be exceeded.
c. Additional display considerations
(1) While the situations described above are for discrete viewing positions, the same arguments can be extended to moving eye points produced by the viewer's head movement. In the real world, the parallax effects resulting from head movement provide distance cues. The effect is particularly strong for relative movement of flight deck structure in the near field and modeled objects in the distance. Collimated displays will provide accurate parallax cues for distant objects, but increasingly inaccurate cues for near field objects. The situation is reversed for dome displays.
(2) Stereopsis cues resulting from the different images presented to each eye for objects relatively close to the viewer also provide depth cues. Again, the collimated and dome displays provide more or less accurate cues depending on the modeled distance of the objects being viewed.
d. Training implications
(1) In view of the basic principles described above, it is clear that neither display approach provides a completely accurate image for all possible object distances. The sponsor should consider the training role of the FFS when configuring the display system to make the optimum choice. Factors that should be considered include relative importance of training tasks at low altitudes, the role of the two crew members in the flying tasks, and the field-of-view required for specific training tasks.
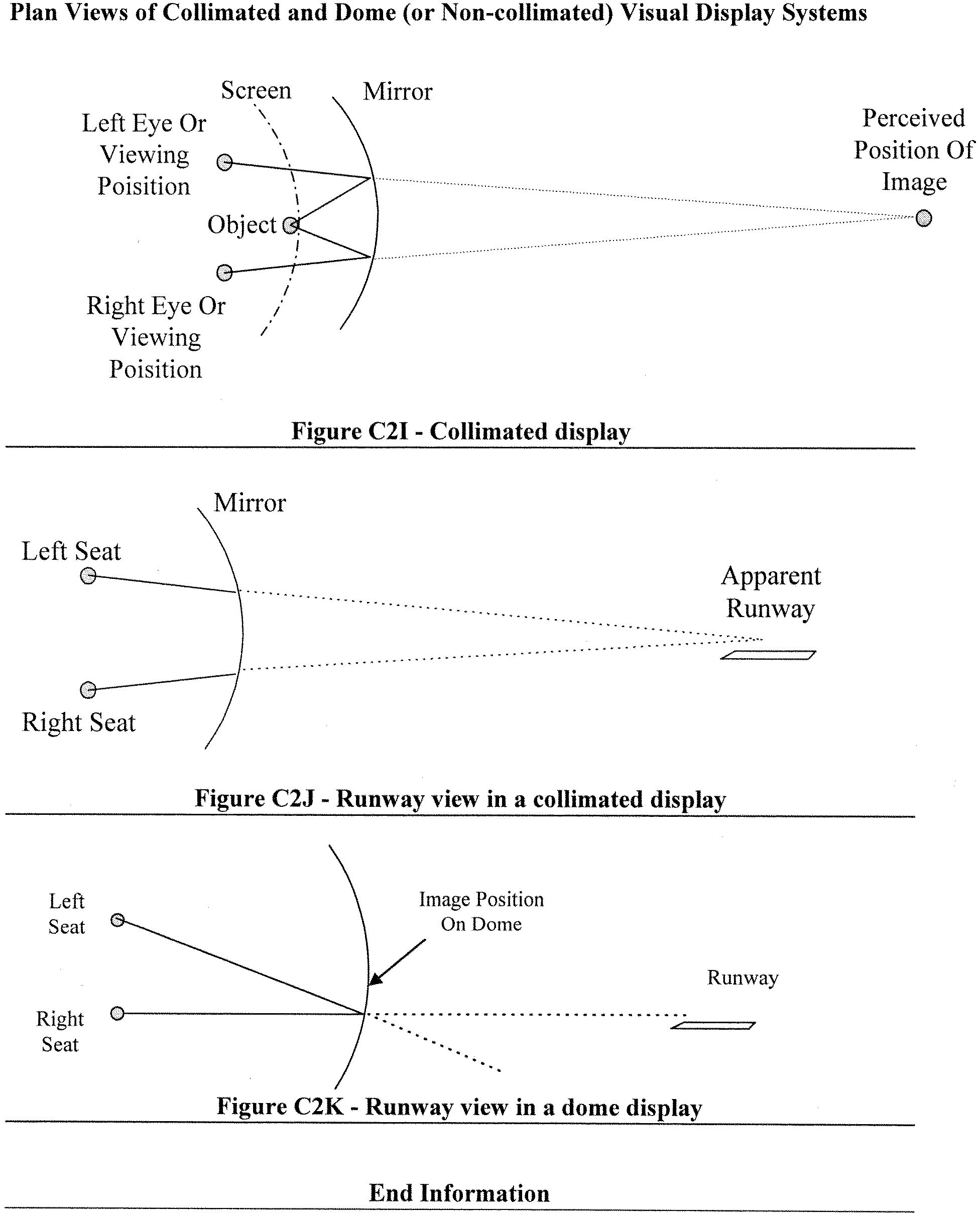
Attachment 3 to Appendix C to Part 60—Simulator Subjective Evaluation
Begin QPS Requirements
1. Requirements
a. Except for special use airport models, all airport models required by this part must be representations of real-world, operational airports or representations of fictional airports and must meet the requirements set out in Tables C3B or C3C of this attachment, as appropriate.
b. If fictional airports are used, the sponsor must ensure that navigational aids and all appropriate maps, charts, and other navigational reference material for the fictional airports (and surrounding areas as necessary) are compatible, complete, and accurate with respect to the visual presentation and airport model of this fictional airport. An SOC must be submitted that addresses navigation aid installation and performance and other criteria (including obstruction clearance protection) for all instrument approaches to the fictional airports that are available in the simulator. The SOC must reference and account for information in the terminal instrument procedures manual and the construction and availability of the required maps, charts, and other navigational material. This material must be clearly marked “for training purposes only.”
c. When the simulator is being used by an instructor or evaluator for purposes of training, checking, or testing under this chapter, only airport models classified as Class I, Class II, or Class III may be used by the instructor or evaluator. Detailed descriptions/definitions of these classifications are found in Appendix F of this part.
d. When a person sponsors an FFS maintained by a person other than a U.S. certificate holder, the sponsor is accountable for that FFS originally meeting, and continuing to meet, the criteria under which it was originally qualified and the appropriate Part 60 criteria, including the visual scenes and airport models that may be used by instructors or evaluators for purposes of training, checking, or testing under this chapter.
e. Neither Class II nor Class III airport visual models are required to appear on the SOQ, and the method used for keeping instructors and evaluators apprised of the airport models that meet Class II or Class III requirements on any given simulator is at the option of the sponsor, but the method used must be available for review by the TPAA.
f. When an airport model represents a real world airport and a permanent change is made to that real world airport (e.g., a new runway, an extended taxiway, a new lighting system, a runway closure) without a written extension grant from the NSPM (described in paragraph 1.g., of this section), an update to that airport model must be made in accordance with the following time limits:
(1) For a new airport runway, a runway extension, a new airport taxiway, a taxiway extension, or a runway/taxiway closure—within 90 days of the opening for use of the new airport runway, runway extension, new airport taxiway, or taxiway extension; or within 90 days of the closure of the runway or taxiway.
(2) For a new or modified approach light system—within 45 days of the activation of the new or modified approach light system.
(3) For other facility or structural changes on the airport (e.g., new terminal, relocation of Air Traffic Control Tower)—within 180 days of the opening of the new or changed facility or structure.
g. If a sponsor desires an extension to the time limit for an update to a visual scene or airport model or has an objection to what must be updated in the specific airport model requirement, the sponsor must provide a written extension request to the NSPM stating the reason for the update delay and a proposed completion date or provide an explanation for the objection, explaining why the identified airport change will not have an impact on flight training, testing, or checking. A copy of this request or objection must also be sent to the POI/TCPM. The NSPM will send the official response to the sponsor and a copy to the POI/TCPM; however, if there is an objection, after consultation with the appropriate POI/TCPM regarding the training, testing, or checking impact, the NSPM will send the official response to the sponsor and a copy to the POI/TCPM.
End QPS Requirements
Begin Information
2. Discussion
a. The subjective tests provide a basis for evaluating the capability of the simulator to perform over a typical utilization period; determining that the simulator competently simulates each required maneuver, procedure, or task; and verifying correct operation of the simulator controls, instruments, and systems. The items listed in the following Tables are for simulator evaluation purposes only. They may not be used to limit or exceed the authorizations for use of a given level of simulator as described on the SOQ or as approved by the TPAA. All items in the following paragraphs are subject to an examination.
b. The tests in Table C3A, Operations Tasks, in this attachment address pilot functions, including maneuvers and procedures (called flight tasks), and are divided by flight phases. The performance of these tasks by the NSPM includes an operational examination of the visual system and special effects. There are flight tasks included to address some features of advanced technology helicopters and innovative training programs.
c. The tests in Table C3A, Operations Tasks, and Table C3G, Instructor Operating Station, in this attachment address the overall function and control of the simulator including the various simulated environmental conditions; simulated helicopter system operation (normal, abnormal, and emergency); visual system displays; and special effects necessary to meet flight crew training, evaluation, or flight experience requirements.
d. All simulated helicopter systems functions will be assessed for normal and, where appropriate, alternate operations. Normal, abnormal, and emergency operations associated with a flight phase will be assessed during the evaluation of flight tasks or events within that flight phase. Simulated helicopter systems are listed separately under “Any Flight Phase” to ensure appropriate attention to systems checks. Operational navigation systems (including inertial navigation systems, global positioning systems, or other long-range systems) and the associated electronic display systems will be evaluated if installed. The NSP pilot will include in his report to the TPAA, the effect of the system operation and any system limitation.
e. Simulators demonstrating a satisfactory circling approach will be qualified for the circling approach maneuver and may be approved for such use by the TPAA in the sponsor's FAA-approved flight training program. To be considered satisfactory, the circling approach will be flown at maximum gross weight for landing, with minimum visibility for the helicopter approach category, and must allow proper alignment with a landing runway at least 90° different from the instrument approach course while allowing the pilot to keep an identifiable portion of the airport in sight throughout the maneuver (reference—14 CFR 91.175(e)).
f. At the request of the TPAA, the NSP Pilot may assess the simulator for a special aspect of a sponsor's training program during the functions and subjective portion of an evaluation. Such an assessment may include a portion of a Line Oriented Flight Training (LOFT) scenario or special emphasis items in the sponsor's training program. Unless directly related to a requirement for the qualification level, the results of such an evaluation would not affect the qualification of the simulator.
g. This appendix addresses helicopter simulators at Levels B, C, and D because there are no Level A Helicopter simulators.
h. The FAA intends to allow the use of Class III airport models on a limited basis when the sponsor provides the TPAA (or other regulatory authority) an appropriate analysis of the skills, knowledge, and abilities (SKAs) necessary for competent performance of the tasks in which this particular media element is used. The analysis should describe the ability of the FFS/visual media to provide an adequate environment in which the required SKAs are satisfactorily performed and learned. The analysis should also include the specific media element, such as the visual scene or airport model. Additional sources of information on the conduct of task and capability analysis may be found on the FAA's Advanced Qualification Program (AQP) Web site at: http://www.faa.gov/education_research/training/aqp/.
h. The TPAA may accept Class III airport models without individual observation provided the sponsor provides the TPAA with an acceptable description of the process for determining the acceptability of a specific airport model, outlines the conditions under which such an airport model may be used, and adequately describes what restrictions will be applied to each resulting airport or landing area model. Examples of situations that may warrant Class III model designation by the TPAA include the following:
(a) Training, testing, or checking on very low visibility operations, including SMGCS operations.
(b) Instrument operations training (including instrument takeoff, departure, arrival, approach, and missed approach training, testing, or checking) using—
(i) A specific model that has been geographically “moved” to a different location and aligned with an instrument procedure for another airport.
(ii) A model that does not match changes made at the real-world airport (or landing area for helicopters) being modeled.
(iii) A model generated with an “off-board” or an “on-board” model development tool (by providing proper latitude/longitude reference; correct runway or landing area orientation, length, width, marking, and lighting information; and appropriate adjacent taxiway location) to generate a facsimile of a real world airport or landing area.
i. Previously qualified simulators with certain early generation Computer Generated Image (CGI) visual systems, are limited by the capability of the Image Generator or the display system used. These systems are:
(1) Early CGI visual systems that are exempt from the necessity of including runway numbers as a part of the specific runway marking requirements are:
(a) Link NVS and DNVS.
(b) Novoview 2500 and 6000.
(c) FlightSafety VITAL series up to, and including, VITAL III, but not beyond.
(d) Redifusion SP1, SP1T, and SP2.
(2) Early CGI visual systems are excepted from the necessity of including runway numbers unless the runway is used for LOFT training sessions. These LOFT airport models require runway numbers, but only for the specific runway end (one direction) used in the LOFT session. The systems required to display runway numbers only for LOFT scenes are:
(a) FlightSafety VITAL IV.
(b) Redifusion SP3 and SP3T.
(c) Link-Miles Image II.
(3) The following list of previously qualified CGI and display systems are incapable of generating blue lights. These systems are not required to have accurate taxi-way edge lighting are:
(a) Redifusion SP1 and SP1T.
(b) FlightSafety Vital IV.
(c) Link-Miles Image II and Image IIT
(d) XKD displays (even though the XKD image generator is capable of generating blue colored lights, the display cannot accommodate that color).
End Information
Table C3A—Functions and Subjective Tests
QPS requirements | ||||
|---|---|---|---|---|
Entry No. | Operations tasks | Simulator level | ||
B | C | D | ||
Tasks in this table are subject to evaluation if appropriate for the helicopter simulated as indicated in the SOQ Configuration List or the level of simulator qualification involved. Items not installed or not functional on the simulator and, therefore, not appearing on the SOQ Configuration List, are not required to be listed as exceptions on the SOQ. | ||||
1. Preparation for Flight | ||||
1.a. | Flight deck check: Switches, indicators, systems, and equipment | X | X | X |
2. APU/Engine start and run-up | ||||
2.a. | Normal start procedures | X | X | X |
2.b. | Alternate start procedures | X | X | X |
2.c. | Abnormal starts and shutdowns (e.g., hot start, hung start) | X | X | X |
2.d. | Rotor engagement | X | X | X |
2.e. | System checks | X | X | X |
3. Taxiing—Ground | ||||
3.a | Power required to taxi | X | X | X |
3.b. | Brake effectiveness | X | X | X |
3.c. | Ground handling | X | X | X |
3.d. | Water handling (if applicable) | X | X | |
3.e. | Abnormal/emergency procedures: | |||
3.e.1. | Brake system failure | X | X | X |
3.e.2. | Ground resonance | X | X | |
3.e.3. | Dynamic rollover | X | X | |
3.e.4. | Deployment of emergency floats/water landing | X | X | |
3.e.5. | Others listed on the SOQ | A | X | X |
4. Taxiing—Hover | ||||
4.a. | Takeoff to a hover | X | X | X |
4.b. | Instrument response: | |||
4.b.1. | Engine instruments | X | X | X |
4.b.2. | Flight instruments | X | X | X |
4.b.3. | Hovering turns | X | X | X |
4.c. | Hover power checks: | |||
4.c.1. | In ground effect (IGE) | X | X | X |
4.c.2. | Out of ground effect (OGE) | X | X | X |
4.d. | Crosswind/tailwind hover | X | X | X |
4.e. | Translating tendency | X | X | X |
4.f. | External load operations: | |||
4.f.1. | Hookup | X | X | |
4.f.2. | Release | X | X | |
4.f.3. | Winch operations | X | X | |
4.g. | Abnormal/emergency procedures: | |||
4.g.1. | Engine failure | X | X | X |
4.g.2. | Fuel governing system failure | X | X | X |
4.g.3. | Settling with power (OGE) | X | X | X |
4.g.4. | Hovering autorotation | X | X | |
4.g.5. | Stability augmentation system failure | X | X | X |
4.g.6. | Directional control malfunction | X | X | X |
4.g.7. | Loss of tail rotor effectiveness (LTE) | X | X | |
4.g.8. | Others listed on the SOQ | A | X | X |
4.h. | Pre-takeoff checks | X | X | X |
5. Takeoff/Translational Flight | ||||
5.a. | Forward (up to effective translational lift) | X | X | |
5.b. | Sideward (up to limiting airspeed) | X | X | |
5.c. | Rearward (up to limiting airspeed) | X | X | |
6. Takeoff and Departure Phase | ||||
6.a. | Normal | X | X | X |
6.a.1. | From ground | X | X | X |
6.a.2. | From hover | X | X | X |
6.a.2.a. | Cat A | X | X | X |
6.a.2.b. | Cat B | X | X | X |
6.a.3. | Running | X | X | X |
6.a.4. | Crosswind/tailwind | X | X | X |
6.a.5. | Maximum performance | X | X | X |
6.a.6. | Instrument | X | X | X |
6.a.7. | Takeoff from a confined area | X | X | X |
6.a.8. | Takeoff from a pinnacle/platform | X | X | X |
6.a.9. | Takeoff from a slope | X | X | X |
6.a.10. | External load operations | X | X | |
6.b. | Abnormal/emergency procedures: | X | X | X |
6.b.1. | Takeoff with engine failure after critical decision point (CDP) | X | X | X |
6.b.1.a. | Cat A | X | X | |
6.b.1.b. | Cat B | X | X | |
6.c. | Rejected takeoff | |||
6.c.1. | Land | X | X | X |
6.c.2. | Water (if appropriate) | X | X | X |
6.d. | Instrument departure | X | X | X |
6.e. | Others as listed on the SOQ | A | X | X |
7. Climb | ||||
7.a. | Normal | X | X | X |
7.b. | Obstacle clearance | X | X | X |
7.c. | Vertical | X | X | |
7.d. | One engine inoperative | X | X | X |
7.e. | Others as listed on the SOQ | A | X | X |
8. Cruise | ||||
8.a | Performance | X | X | X |
8.b. | Flying qualities | X | X | X |
8.c. | Turns | X | X | X |
8.c.1. | Timed | X | X | X |
8.c.2. | Normal | X | X | X |
8.c.3. | Steep | X | X | X |
8.d. | Accelerations and decelerations | X | X | X |
8.e. | High speed vibrations | X | X | X |
8.f. | External Load Operations (see entry 4.f. of this table) | X | X | |
8.g. | Abnormal/emergency procedures | X | X | X |
8.g.1. | Engine fire | X | X | X |
8.g.2 | Engine failure | X | X | X |
8.g.3. | Inflight engine shutdown and restart | X | X | X |
8.g.4. | Fuel governing system failures | X | X | X |
8.g.5. | Directional control malfunction | X | X | X |
8.g.6. | Hydraulic failure | X | X | X |
8.g.7. | Stability system failure | X | X | X |
8.g.8. | Rotor vibrations | X | X | X |
8.g.9. | Recovery from unusual attitudes | X | X | X |
9. Descent | ||||
9.a. | Normal | X | X | X |
9.b. | Maximum rate | X | X | X |
9.c. | Autorotative | |||
9.c.1. | Straight-in | X | X | X |
9.c.2. | With turn | X | X | X |
9.d. | External Load | X | X | |
10. Approach | ||||
10.a. | Non-precision | X | X | X |
10.a.1. | All engines operating | X | X | X |
10.a.2. | One or more engines inoperative | X | X | X |
10.a.3. | Approach procedures: | X | X | X |
10.a.3.a. | NDB | X | X | X |
10.a.3.b. | VOR, RNAV, TACAN | X | X | X |
10.a.3.c. | ASR | X | X | X |
10.a.3.d. | Circling | X | X | X |
10.a.3.e. | Helicopter only | X | X | X |
10.a.4. | Missed approach | X | X | X |
10.a.4.a. | All engines operating | X | X | X |
10.a.4.b. | One or more engines inoperative | X | X | X |
10.b. | Precision | X | X | X |
10.b.1. | All engines operating | X | X | X |
10.b.2. | Manually controlled—one or more engines inoperative | X | X | X |
10.b.3. | Approach procedures: | X | X | X |
10.b.3.a. | PAR | X | X | X |
10.b.3.b. | MLS | X | X | X |
10.b.3.c. | ILS | X | X | X |
10.b.3.c. | (1) Manual (raw data) | X | X | X |
10.b.3.c. | (2) Flight director only | X | X | X |
10.b.3.c. | (3) Autopilot * only | X | X | X |
10.b.3.c. | (4) Cat I | X | X | X |
10.b.3.c. | (5) Cat II | X | X | X |
10.b.4. | Missed approach: | |||
10.b.4.a. | All engines operating | X | X | X |
10.b.4.b. | One or more engines inoperative | X | X | X |
10.b.4.c. | Stability system failure | X | X | X |
10.c. | Others as listed on the SOQ | A | X | X |
11. Landings and Approaches to Landings | ||||
11.a. | Visual Approaches: | |||
11.a.1. | Normal | X | X | X |
11.a.2. | Steep | X | X | X |
11.a.3. | Shallow | X | X | X |
11.a.4. | Crosswind | X | X | X |
11.a.5. | Category A profile | X | X | |
11.a.6. | Category B profile | X | X | |
11.a.7. | External Load | X | X | |
11.b. | Abnormal/emergency procedures: | |||
11.b.1. | Directional control failure | X | X | X |
11.b.2. | Hydraulics failure | X | X | X |
11.b.3. | Fuel governing failure | X | X | X |
11.b.4. | Autorotation | X | X | X |
11.b.5. | Stability system failure | X | X | X |
11.b.6. | Others listed on the SOQ | A | X | X |
11c. | Landings: | |||
11.c.1. | Normal: | |||
11.c.1.a. | Running | X | X | X |
11.c.1.b. | From Hover | X | X | X |
11.c.2. | Pinnacle/platform | X | X | X |
11.c.3. | Confined area | X | X | X |
11.c.4. | Slope | X | X | |
11.c.5. | Crosswind | X | X | X |
11.c.6. | Tailwind | X | X | X |
11.c.7. | Rejected Landing | X | X | X |
11.c.8. | Abnormal/emergency procedures: | |||
11.c.8.a. | From autorotation | X | X | |
11.c.8.b. | One or more engines inoperative | X | X | X |
11.c.8.c. | Directional control failure | X | X | X |
11.c.8.d. | Hydraulics failure | X | X | X |
11.c.8.e. | Stability augmentation system failure | X | X | X |
11.c.9. | Other (listed on the SOQ) | A | X | X |
12. Any Flight Phase | ||||
12.a.1. | Air conditioning | X | X | X |
12.a.2. | Anti-icing/deicing | X | X | X |
12.a.3. | Auxiliary power-plant | X | X | X |
12.a.4. | Communications | X | X | X |
12.a.5. | Electrical | X | X | X |
12.a.6. | Fire detection and suppression | X | X | X |
12.a.7. | Stabilizer | X | X | X |
12.a.8. | Flight controls | X | X | X |
12.a.9. | Fuel and oil | X | X | X |
12.a.10. | Hydraulic | X | X | X |
12.a.11. | Landing gear | X | X | X |
12.a.12. | Oxygen | X | X | X |
12.a.13. | Pneumatic | X | X | X |
12.a.14. | Powerplant | X | X | X |
12.a.15. | Flight control computers | X | X | X |
12.a.16. | Stability and control augmentation | X | X | X |
12.b. | Flight management and guidance system: | |||
12.b.1. | Airborne radar | X | X | X |
12.b.2. | Automatic landing aids | X | X | X |
12.b.3. | Autopilot | X | X | X |
12.b.4. | Collision avoidance system | X | X | X |
12.b.5. | Flight data displays | X | X | X |
12.b.6. | Flight management computers | X | X | X |
12.b.7. | Heads-up displays | X | X | X |
12.b.8. | Navigation systems | X | X | X |
12.c. | Airborne procedures: | |||
12.c.1. | Holding | X | X | X |
12.c.2. | Air hazard avoidance | X | X | X |
12.c.3. | Retreating blade stall recovery | X | X | X |
12.c.4. | Mast bumping | X | X | X |
12.c.5 | Loss of directional control | X | X | X |
12.c.6. | Loss of tail rotor effectiveness | X | X | |
12.c.7. | Other (listed on the SOQ) | A | X | X |
13. Engine Shutdown and Parking | ||||
13.a. | Engine and systems operation | X | X | X |
13.b. | Parking brake operation | X | X | X |
13.c. | Rotor brake operation | X | X | X |
13.d. | Abnormal/emergency procedures | X | X | X |
* “Autopilot” means attitude retention mode of operation. | ||||
Note: An “A” in the table indicates that the system, task, or procedure may be examined if the appropriate aircraft system or control is simulated in the FFS and is working properly. | ||||
Table C3B—Functions and Subjective Tests
QPS requirements | ||||
|---|---|---|---|---|
Entry No. | Visual requirements for qualification at the stated levelclass I airport or landing area models | Simulator level | ||
B | C | D | ||
This table specifies the minimum airport visual model content and functionality to qualify a simulator at the indicated level. This table applies only to the airport scenes required for simulator qualification; i.e., two helicopter landing area models for Level B simulators; four helicopter landing area models for Level C and Level D simulators. | ||||
1. | Functional test content requirements | |||
The following is the minimum airport/landing area model content requirement to satisfy visual capability tests, and provides suitable visual cues to allow completion of all functions and subjective tests described in this attachment for simulators at Level B. | ||||
1.a. | A minimum of one (1) representative airport and one (1) representative helicopter landing area model. The airport and the helicopter landing area may be contained within the same model. If but if this option is selected, the approach path to the airport runway(s) and the approach path to the helicopter landing area must be different. The model(s) used to meet the following requirements may be demonstrated at either a fictional or a real-world airport or helicopter landing area, but each must be acceptable to the sponsor's TPAA, selectable from the IOS, and listed on the SOQ | X | ||
1.b. | The fidelity of the visual scene must be sufficient for the aircrew to visually identify the airport and/or helicopter landing area; determine the position of the simulated helicopter within the visual scene; successfully accomplish take-offs, approaches, and landings; and maneuver around the airport on the ground, or hover taxi, as necessary | X | ||
1.c. | Runways: | |||
1.c.1. | Visible runway number | X | ||
1.c.2. | Runway threshold elevations and locations must be modeled to provide sufficient correlation with helicopter systems (e.g., altimeter) | X | ||
1.c.3. | Runway surface and markings | X | ||
1.c.4. | Lighting for the runway in use including runway edge and centerline | X | ||
1.c.5. | Lighting, visual approach aid (VASI or PAPI) and approach lighting of appropriate colors | X | ||
1.c.6. | Representative taxiway lights | X | ||
1.d. | Other helicopter landing area: | |||
1.d.1. | Standard heliport designation (“H”) marking, properly sized and oriented | X | ||
1.d.2. | Perimeter markings for the Touchdown and Lift-Off Area (TLOF) or the Final Approach and Takeoff Area (FATO), as appropriate | X | ||
1.d.3. | Perimeter lighting for the TLOF or the FATO areas, as appropriate | X | ||
1.d.4. | Appropriate markings and lighting to allow movement from the runway or helicopter landing area to another part of the landing facility | X | ||
2. | Functional test content requirements for Level C and Level D simulators | |||
The following is the minimum airport/landing area model content requirement to satisfy visual capability tests, and provide suitable visual cues to allow completion of all functions and subjective tests described in this attachment for simulators at Level C and Level D. Not all of the elements described in this section must be found in a single airport/landing area scene. However, all of the elements described in this section must be found throughout a combination of the four (4) airport/landing area models described in entry 2.a. The representations of the hazards (as described in 2.d.) must be “hard objects” that interact as such if contacted by the simulated helicopter. Additionally, surfaces on which the helicopter lands must be “hard surfaces.” The model(s) used to meet the following requirements must be demonstrated at either a fictional or a real-world airport or helicopter landing area, and each must be acceptable to the sponsor's TPAA, selectable from the IOS, and listed on the SOQ. | ||||
2.a. | There must be at least the following airport/helicopter landing areas. | |||
2.a.1. | At least one (1) representative airport | X | X | |
2.a.2. | At least three representative non-airport landing areas, as follows: | |||
2.a.2.a | At least one (1) representative helicopter landing area situated on a substantially elevated surface with respect to the surrounding structures or terrain (e.g., building top, offshore oil rig) | X | X | |
2.a.2.b. | At least one (1) helicopter landing area that meets the definition of a “confined landing area” | X | X | |
2.a.2.c. | At least one (1) helicopter landing area on a sloped surface where the slope is at least 21⁄2° | X | X | |
2.b. | For each of the airport/helicopter landing areas described in 2.a., the simulator must be able to provide at least the following: | X | X | |
2.b.1. | A night and twilight (dusk) environment. | X | X | |
2.b.2. | A daylight environment | X | ||
2.c. | Non-airport helicopter landing areas must have the following: | |||
2.c.1. | Representative buildings, structures, and lighting within appropriate distances | X | X | |
2.c.2. | Representative moving and static clutter (e.g., other aircraft, power carts, tugs, fuel trucks) | X | X | |
2.c.3. | Representative depiction of terrain and obstacles as well as significant and identifiable natural and cultural features, within 25 NM of the reference landing area | X | X | |
2.c.4. | Standard heliport designation (“H”) marking, properly sized and oriented | X | X | |
2.c.5. | Perimeter markings for the Touchdown and Lift-Off Area (TLOF) or the Final Approach and Takeoff Area (FATO), as appropriate | X | X | |
2.c.6. | Perimeter lighting for the TLOF or the FATO areas, as appropriate | X | X | |
2.c.7. | Appropriate markings and lighting to allow movement from the area to another part of the landing facility, if appropriate | X | X | |
2.c.8. | Representative markings, lighting, and signage, including a windsock that gives appropriate wind cues | X | X | |
2.c.9. | Appropriate markings, lighting, and signage necessary for position identification, and to allow movement from the landing area to another part of the landing facility | X | X | |
2.c.10. | Representative moving and static ground traffic (e.g., vehicular and aircraft), including the ability to present surface hazards (e.g., conflicting traffic, vehicular or aircraft, on or approaching the landing area) | X | X | |
2.c.11. | Portrayal of landing surface contaminants, including lighting reflections when wet and partially obscured lights when snow is present, or suitable alternative effects | X | X | |
2.d. | All of the following three (3) hazards must be presented in a combination of the three (3) non-airport landing areas (described in entry 2.a.2. of this table) and each of these non-airport landing areas must have at least one of the following hazards: | |||
2.d.1. | Other airborne traffic | X | X | |
2.d.2. | Buildings, trees, or other vertical obstructions in the immediate landing area | X | X | |
2.d.3. | Suspended wires in the immediate landing area | X | X | |
2.e. | Airport applications. Each airport must have the following: | |||
2.e.1. | At least one runway designated as “in-use”, appropriately marked and capable of being lighted fully | X | X | |
2.e.2. | Runway threshold elevations and locations must be modeled to provide sufficient correlation with helicopter systems (e.g., HGS, GPS, altimeter). Slopes in runways, taxiways, and ramp areas, if depicted in the visual scene, may not cause distracting or unrealistic effects, including pilot eye-point height variation | X | X | X |
2.e.3. | Appropriate approach lighting systems and airfield lighting for a VFR circuit and landing, non-precision approaches and landings, and precision approaches and landings, as appropriate. | X | X | |
2.e.4. | Representative taxiway lights | X | ||
3. | Airport or landing area model management | |||
The following is the minimum visual scene management requirements | ||||
3.a. | Runway and helicopter landing area approach lighting must fade into view in accordance with the environmental conditions set in the simulator | X | X | X |
3.b. | The direction of strobe lights, approach lights, runway edge lights, visual landing aids, runway centerline lights, threshold lights, touchdown zone lights, and TLOF or FATO lights must be replicated | X | X | X |
4. | Visual feature recognition. | |||
The following are the minimum distances at which runway features must be visible. Distances are measured from runway threshold or a helicopter landing area to a helicopter aligned with the runway or helicopter landing area on an extended 3° glide-slope in simulated meteorological conditions. For circling approaches, all tests apply to the runway used for the initial approach and to the runway of intended landing | ||||
4.a. | For runways: Runway definition, strobe lights, approach lights, and runway edge lights from 5 sm (8 km) of the runway threshold | X | X | X |
4.b. | For runways: Centerline lights and taxiway definition from 3 sm (5 km) | X | X | X |
4.c. | For runways: Visual Approach Aid lights (VASI or PAPI) from 3 sm (5 km) of the threshold | X | ||
4.d. | For runways: Visual Approach Aid lights (VASI or PAPI) from 5 sm (8 km) of the threshold | X | X | |
4.e. | For runways: Runway threshold lights and touchdown zone lights from 2 sm (3 km) | X | X | X |
4.f. | For runways and helicopter landing areas: Markings within range of landing lights for night/twilight scenes and the surface resolution test on daylight scenes, as required | X | X | X |
4.g. | For circling approaches, the runway of intended landing and associated lighting must fade into view in a non-distracting manner | X | X | X |
4.h. | For helicopter landing areas: Landing direction lights and raised FATO lights from 1 sm (1.5 km) | X | X | X |
4.i. | For helicopter landing areas: Flush mounted FATO lights, TOFL lights, and the lighted windsock from 0.5 sm (750 m) | X | ||
4.j. | Hover taxiway lighting (yellow/blue/yellow cylinders) from TOFL area | X | ||
5. | Airport or helicopter landing area model content | |||
The following prescribes the minimum requirements for an airport/helicopter landing area model and identifies other aspects of the environment that must correspond with that model for simulators at Level B, Level C, and Level D. For circling approaches, all tests apply to the runway used for the initial approach and to the runway of intended landing. If all runways or landing areas in a visual model used to meet the requirements of this attachment are not designated as “in use,” then the “in use” runways/landing areas must be listed on the SOQ (e.g., KORD, Rwys 9R, 14L, 22R). Models of airports or helicopter landing areas with more than one runway or landing area must have all significant runways or landing areas not “in-use” visually depicted for airport runway/landing area recognition purposes. The use of white or off-white light strings that identify the runway or landing area for twilight and night scenes are acceptable for this requirement; and rectangular surface depictions are acceptable for daylight scenes. A visual system's capabilities must be balanced between providing visual models with an accurate representation of the airport and a realistic representation of the surrounding environment. Each runway or helicopter landing area designated as an “in-use” runway or area must include the following detail that is developed using airport pictures, construction drawings and maps, or other similar data, or developed in accordance with published regulatory material; however, this does not require that such models contain details that are beyond the design capability of the currently qualified visual system. Only one “primary” taxi route from parking to the runway end or helicopter takeoff/landing area will be required for each “in-use” runway or helicopter takeoff/landing area. | ||||
5.a. | The surface and markings for each “in-use” runway or helicopter landing area must include the following: | |||
5.a.1. | For airports: Runway threshold markings, runway numbers, touchdown zone markings, fixed distance markings, runway edge markings, and runway centerline stripes | X | X | X |
5.a.2. | For helicopter landing areas: Markings for standard heliport identification (“H”) and TOFL, FATO, and safety areas | X | X | X |
5.b. | The lighting for each “in-use” runway or helicopter landing area must include the following: | |||
5.b.1. | For airports: Runway approach, threshold, edge, end, centerline (if applicable), touchdown zone (if applicable), leadoff, and visual landing aid lights or light systems for that runway | X | X | X |
5.b.2. | For helicopter landing areas: landing direction, raised and flush FATO, TOFL, windsock lighting | X | X | X |
5.c. | The taxiway surface and markings associated with each “in-use” runway or helicopter landing area must include the following: | |||
5.c.1. | For airports: Taxiway edge, centerline (if appropriate), runway hold lines, and ILS critical area(s) | X | X | X |
5.c.2. | For helicopter landing areas: taxiways, taxi routes, and aprons | X | X | X |
5.d. | The taxiway lighting associated with each “in-use” runway or helicopter landing area must include the following: | |||
5.d.1. | For airports: Runway edge, centerline (if appropriate), runway hold lines, ILS critical areas | X | X | X |
5.d.2. | For helicopter landing areas: taxiways, taxi routes, and aprons | X | X | X |
5.d.3. | For airports: taxiway lighting of correct color | X | ||
5.e. | Airport signage associated with each “in-use” runway or helicopter landing area must include the following: | |||
5.e.1. | For airports: Signs for runway distance remaining, intersecting runway with taxiway, and intersecting taxiway with taxiway | X | X | X |
5.e.2. | For helicopter landing areas: as appropriate for the model used | X | X | X |
5.f. | Required visual model correlation with other aspects of the airport or helicopter landing environment simulation: | |||
5.f.1. | The airport or helicopter landing area model must be properly aligned with the navigational aids that are associated with operations at the “in-use” runway or helicopter landing area | X | X | X |
5.f.2. | The simulation of runway or helicopter landing area contaminants must be correlated with the displayed runway surface and lighting where applicable | X | X | |
6. | Correlation with helicopter and associated equipment | |||
The following are the minimum correlation comparisons that must be made for simulators at Level B, Level C, and Level D | ||||
6.a. | Visual system compatibility with aerodynamic programming | X | X | X |
6.b. | Visual cues to assess sink rate and depth perception during landings | X | X | X |
6.c. | Accurate portrayal of environment relating to flight simulator attitudes | X | X | X |
6.d. | The visual scene must correlate with integrated helicopter systems (e.g., terrain, traffic and weather avoidance systems and Head-up Guidance System (HGS)) | X | X | |
6.e. | Representative visual effects for each visible, own-ship, helicopter external light(s)—taxi and landing light lobes (including independent operation, if appropriate) | X | X | X |
6.f. | The effect of rain removal devices | X | X | |
7. | Scene quality The following are the minimum scene quality tests that must be conducted for simulators at Level B, Level C, and Level D. | |||
7.a. | Surfaces and textural cues must be free from apparent and distracting quantization (aliasing) | X | X | |
7.b. | System capable of portraying full color realistic textural cues | X | X | |
7.c. | The system light points must be free from distracting jitter, smearing or streaking | X | X | X |
7.d. | Demonstration of occulting through each channel of the system in an operational scene | X | X | X |
7.e. | Demonstration of a minimum of ten levels of occulting through each channel of the system in an operational scene | X | X | |
7.f. | System capable of providing focus effects that simulate rain. | X | X | |
7.g. | System capable of providing focus effects that simulate light point perspective growth | X | X | |
7.h. | Runway light controls capable of six discrete light steps (0-5) | X | X | X |
8. | Environmental effects. | |||
The following are the minimum environmental effects that must be available in simulators at Level B, Level C, and Level D. | ||||
8.a. | The displayed scene corresponding to the appropriate surface contaminants and include appropriate lighting reflections for wet, partially obscured lights for snow, or alternative effects | X | ||
8.b. | Special weather representations which include: | |||
8.b.1. | The sound, motion and visual effects of light, medium and heavy precipitation near a thunderstorm on take-off, approach, and landings at and below an altitude of 2,000 ft (600 m) above the surface and within a radius of 10 sm (16 km) from the airport or helicopter landing area | X | ||
8.b.2. | One airport or helicopter landing area with a snow scene to include terrain snow and snow-covered surfaces | X | ||
8.c. | In-cloud effects such as variable cloud density, speed cues and ambient changes | X | X | |
8.d. | The effect of multiple cloud layers representing few, scattered, broken and overcast conditions giving partial or complete obstruction of the ground scene | X | X | |
8.e. | Visibility and RVR measured in terms of distance. Visibility/RVR checked at 2,000 ft (600 m) above the airport or helicopter landing area and at two heights below 2,000 ft with at least 500 ft of separation between the measurements. The measurements must be taken within a radius of 10 sm (16 km) from the airport or helicopter landing area | X | X | X |
8.f. | Patchy fog giving the effect of variable RVR | X | ||
8.g. | Effects of fog on airport lighting such as halos and defocus | X | X | |
8.h. | Effect of own-ship lighting in reduced visibility, such as reflected glare, including landing lights, strobes, and beacons | X | X | |
8.i. | Wind cues to provide the effect of blowing snow or sand across a dry runway or taxiway selectable from the instructor station | X | ||
8.j. | “White-out” or “Brown-out” effects due to rotor downwash beginning at a distance above the ground equal to the rotor diameter | X | ||
9. | Instructor control of the following: | |||
The following are the minimum instructor controls that must be available in Level B, Level C, and Level D simulators, as indicated. | ||||
9.a. | Environmental effects, e.g. cloud base, cloud effects, cloud density, visibility in statute miles/ kilometers and RVR in feet/meters | X | X | X |
9.b. | Airport or helicopter landing area selection | X | X | X |
9.c. | Airport or helicopter landing area lighting, including variable intensity | X | X | X |
9.d. | Dynamic effects including ground and flight traffic | X | X | |
End QPS Requirement | ||||
Begin Information | ||||
10. | An example of being able to “combine two airport models to achieve two “in-use” runways: One runway designated as the “in-use” runway in the first model of the airport, and the second runway designated as the “in-use” runway in the second model of the same airport. For example, the clearance is for the ILS approach to Runway 27, Circle to Land on Runway 18 right. Two airport visual models might be used: the first with Runway 27 designated as the “in use” runway for the approach to runway 27, and the second with Runway 18 Right designated as the “in use” runway. When the pilot breaks off the ILS approach to runway 27, the instructor may change to the second airport visual model in which runway 18 Right is designated as the “in use” runway, and the pilot would make a visual approach and landing. This process is acceptable to the FAA as long as the temporary interruption due to the visual model change is not distracting to the pilot. | |||
11. | Sponsors are not required to provide every detail of a runway, but the detail that is provided should be correct within reasonable limits. | |||
End Information | ||||
Table C3C—Functions and Subjective Tests
QPS requirements | ||||
|---|---|---|---|---|
Entry No. | Visual scene content additional airport or landing area models beyond minimum required for qualificationClass II airport or landing area models | Simulator level | ||
B | C | D | ||
This table specifies the minimum airport or helicopter landing area visual model content and functionality necessary to add visual models to a simulator's visual model library (i.e., beyond those necessary for qualification at the stated level) without the necessity of further involvement of the NSPM or TPAA. | ||||
1. | Airport or landing area model management | |||
The following is the minimum visual scene management requirements for simulators at Levels B, C, and D. | ||||
1.a. | The installation and direction of the following lights must be replicated for the “in-use” surface: | |||
1.a.1. | For “in-use” runways: Strobe lights, approach lights, runway edge lights, visual landing aids, runway centerline lights, threshold lights, and touchdown zone lights | X | X | X |
1.a.2. | For “in-use” helicopter landing areas: ground level TLOF perimeter lights, elevated TLOF perimeter lights (if applicable), Optional TLOF lights (if applicable), ground FATO perimeter lights, elevated TLOF lights (if applicable), landing direction lights | X | X | X |
2. | Visual feature recognition | |||
The following are the minimum distances at which runway or landing area features must be visible for simulators at Levels B, C, and D. Distances are measured from runway threshold or a helicopter landing area to an aircraft aligned with the runway or helicopter landing area on a 3° glide-slope from the aircraft to the touchdown point, in simulated meteorological conditions. For circling approaches, all tests apply to the runway used for the initial approach and to the runway of intended landing. | ||||
2.a. | For Runways: | |||
2.a.1. | Strobe lights, approach lights, and edge lights from 5 sm (8 km) of the threshold | X | X | X |
2.a.2. | Centerline lights and taxiway definition from 3 sm (5 km) | X | X | X |
2.a.3. | Visual Approach Aid lights (VASI or PAPI) from 3 sm (5 km) of the threshold | X | ||
2.a.4. | Visual Approach Aid lights (VASI or PAPI) from 5 sm (8 km) of the threshold | X | X | |
2.a.5. | Threshold lights and touchdown zone lights from 2 sm (3 km) | X | X | X |
2.a.6. | Markings within range of landing lights for night/twilight (dusk) scenes and as required by the surface resolution test on daylight scenes | X | X | X |
2.a.7. | For circling approaches, the runway of intended landing and associated lighting must fade into view in a non-distracting manner | X | X | X |
2.b. | For Helicopter landing areas: | |||
2.b.1. | Landing direction lights and raised FATO lights from 1 sm (1.5 km) | X | X | X |
2.b.2. | Flush mounted FATO lights, TOFL lights, and the lighted windsock from 0.5 sm (750 m) | X | X | |
2.b.3. | Hover taxiway lighting (yellow/blue/yellow cylinders) from TOFL area | X | X | |
2.b.4. | Markings within range of landing lights for night/twilight (dusk) scenes and as required by the surface resolution test on daylight scenes | X | X | X |
3. | Airport or Helicopter landing area model content | |||
The following prescribes the minimum requirements for what must be provided in an airport visual model and identifies other aspects of the airport environment that must correspond with that model for simulators at Level B, C, and D. The detail must be developed using airport pictures, construction drawings and maps, or other similar data, or developed in accordance with published regulatory material; however, this does not require that airport or helicopter landing area models contain details that are beyond the designed capability of the currently qualified visual system. For circling approaches, all requirements of this section apply to the runway used for the initial approach and to the runway of intended landing. Only one “primary” taxi route from parking to the runway end or helicopter takeoff/landing area will be required for each “in-use” runway or helicopter takeoff/landing area. | ||||
3.a. | The surface and markings for each “in-use” runway or helicopter landing area must include the following: | |||
3.a.1. | For airports: Runway threshold markings, runway numbers, touchdown zone markings, fixed distance markings, runway edge markings, and runway centerline stripes | X | X | X |
3.a.2. | For helicopter landing areas: Standard heliport marking (“H”), TOFL, FATO, and safety areas | X | X | X |
3.b. | The lighting for each “in-use” runway or helicopter landing area must include the following: | |||
3.b.1. | For airports: Runway approach, threshold, edge, end, centerline (if applicable), touchdown zone (if applicable), leadoff, and visual landing aid lights or light systems for that runway | X | X | X |
3.b.2. | For helicopter landing areas: Landing direction, raised and flush FATO, TOFL, windsock lighting | X | X | X |
3.c. | The taxiway surface and markings associated with each “in-use” runway or helicopter landing area must include the following: | |||
3.c.1. | For airports: Taxiway edge, centerline (if appropriate), runway hold lines, and ILS critical area(s) | X | X | X |
3.c.2. | For helicopter landing areas: Taxiways, taxi routes, and aprons | X | X | X |
3.d. | The taxiway lighting associated with each “in-use” runway or helicopter landing area must include the following: | |||
3.d.1. | For airports: Runway edge, centerline (if appropriate), runway hold lines, ILS critical areas | X | X | X |
3.d.2. | For helicopter landing areas: Taxiways, taxi routes, and aprons | X | X | X |
3.d.3. | For airports: Taxiway lighting of correct color | X | ||
4. | Required visual model correlation with other aspects of the airport environment simulation | |||
The following are the minimum visual model correlation tests that must be conducted for Level B, Level C, and Level D simulators, as indicated. | ||||
4.a. | The airport model must be properly aligned with the navigational aids that are associated with operations at the “in-use” runway | X | X | X |
4.b. | Slopes in runways, taxiways, and ramp areas, if depicted in the visual scene, must not cause distracting or unrealistic effects | X | X | X |
5. | Correlation with helicopter and associated equipment | |||
The following are the minimum correlation comparisons that must be made for simulators at Level B, C, and D. | ||||
5.a. | Visual system compatibility with aerodynamic programming | X | X | X |
5.b. | Accurate portrayal of environment relating to flight simulator attitudes | X | X | X |
5.c. | Visual cues to assess sink rate and depth perception during landings | X | X | X |
6. | Scene quality | |||
The following are the minimum scene quality tests that must be conducted for simulators at Level B, C, and D. | ||||
6.a. | Light points free from distracting jitter, smearing or streaking | X | X | X |
6.b. | Surfaces and textural cues free from apparent and distracting quantization (aliasing) | X | X | |
6.c. | Correct color and realistic textural cues | X | ||
7. | Instructor controls of the following: | |||
The following are the minimum instructor controls that must be available in Level B, Level C, and Level D simulators, as indicated. | ||||
7.a. | Environmental effects, e.g., cloud base (if used), cloud effects, cloud density, visibility in statute miles/kilometers and RVR in feet/meters | X | X | X |
7.b. | Airport/Heliport selection | X | X | X |
7.c. | Airport lighting including variable intensity | X | X | X |
7.d. | Dynamic effects including ground and flight traffic | X | X | |
End QPS Requirements | ||||
Begin Information | ||||
8. | Sponsors are not required to provide every detail of a runway or helicopter landing area, but the detail that is provided must be correct within the capabilities of the system | X | X | X |
End Information | ||||
Table C3D—Functions and Subjective Tests
QPS requirements | Information | ||||
|---|---|---|---|---|---|
Entry No. | Motion system (and specialaerodynamic model) effects | Simulator level | Notes | ||
B | C | D | |||
This table specifies motion effects that are required to indicate the threshold at which a flight crewmember must be able to recognize an event or situation. Where applicable, flight simulator pitch, side loading and directional control characteristics must be representative of the helicopter. | |||||
1 | Runway rumble, oleo deflection, ground speed, uneven runway, runway and taxiway centerline light characteristics: Procedure: After the helicopter has been pre-set to the takeoff position and then released, taxi at various speeds with a smooth runway and note the general characteristics of the simulated runway rumble effects of oleo deflections. Repeat the maneuver with a runway roughness of 50%, then with maximum roughness. Note the associated motion vibrations affected by ground speed and runway roughness | X | X | X | If time permits, different gross weights can also be selected as this may also affect the associated vibrations depending on helicopter type. The associated motion effects for the above tests should also include an assessment of the effects of rolling over centerline lights, surface discontinuities of uneven runways, and various taxiway characteristics. |
2 | Friction Drag from Skid-type Landing Gear: Procedure: Perform a running takeoff or a running landing and note an increase in a fuselage vibration (as opposed to rotor vibration) due to the friction of dragging the skid along the surface. This vibration will lessen as the ground speed decreases | X | X | ||
3. | Rotor Out-of-Track and/or Out-of-Balance condition: Procedure: Select the malfunction or condition from the IOS. Start the engine(s) normally and check for an abnormal vibration for an Out-of-Track condition and check for an abnormal vibration for an Out-of-Balance condition | X | X | X | Does not require becoming airborne. The abnormal vibration for Out-of-Track and Out-of-Balance conditions should be recognized in the frequency range of the inverse of the period for each; i.e., 1/P for vertical vibration, and 1/P for lateral vibration. |
4. | Bumps associated with the landing gear: Procedure: Perform a normal take-off paying special attention to the bumps that could be perceptible due to maximum oleo extension after lift-off | X | X | X | When the landing gear is extended or retracted, motion bumps can be felt when the gear locks into position. |
5. | Buffet during extension and retraction of landing gear: Procedure: Operate the landing gear. Check that the motion cues of the buffet experienced represent the actual helicopter | X | X | X | |
6. | Failure of Dynamic Vibration Absorber or similar system as appropriate for the helicopter (e.g., droop stop or static stop): Procedure: May be accomplished any time the rotor is engaged. Select the appropriate failure at the IOS, note an appropriate increase in vibration and check that the vibration intensity and frequency increases with an increase in RPM and an increase in collective application | X | X | X | |
7. | Tail Rotor Drive Failure: Procedure: With the engine(s) running and the rotor engaged—select the malfunction and note the immediate increase of medium frequency vibration | X | X | X | The tail rotor operates in the medium frequency range, normally estimated by multiplying the tail rotor gear box ratio by the main rotor RPM. The failure can be recognized by an increase in the vibrations in this frequency range. |
8. | Touchdown cues for main and nose gear: Procedure: Conduct several normal approaches with various rates of descent. Check that the motion cues for the touchdown bumps for each descent rate are representative of the actual helicopter | X | X | X | |
9. | Tire failure dynamics: Procedure: Simulate a single tire failure and a multiple tire failure | X | X | The pilot may notice some yawing with a multiple tire failure selected on the same side. This should require the use of the pedal to maintain control of the helicopter. Dependent on helicopter type, a single tire failure may not be noticed by the pilot and may not cause any special motion effect. Sound or vibration may be associated with the actual tire losing pressure. | |
10. | Engine malfunction and engine damage: Procedure: The characteristics of an engine malfunction as prescribed in the malfunction definition document for the particular flight simulator must describe the special motion effects felt by the pilot. Note the associated engine instruments varying according to the nature of the malfunction and note the replication of the effects of the airframe vibration | X | X | X | |
11. | Tail boom strikes: Procedure: Tail-strikes can be checked by over-rotation of the helicopter at a quick stop or autorotation to the ground | X | X | X | The motion effect should be felt as a noticeable nose down pitching moment. |
12. | Vortex Ring State (Settling with Power): Procedure: Specific procedures may differ between helicopters and may be prescribed by the Helicopter Manufacturer or other subject matter expert. However, the following information is provided for illustrative purposes * * * To enter the maneuver, reduce power below hover power. Hold altitude with aft cyclic until the airspeed approaches 20 knots. Then allow the sink rate to increase to 300 feet per minute or more as the attitude is adjusted to obtain an airspeed of less than 10 knots | X | X | When the aircraft begins to shudder, the application of additional up collective increases the vibration and sink rate. One recovery method is to decrease collective to enter vertical autorotation and/or use cyclic inputs to gain horizontal airspeed and exit from vortex ring state. | |
13. | Retreating Blade Stall: Procedure: Specific procedures may differ between helicopters and may be prescribed by the Helicopter Manufacturer or other subject matter expert. However, the following information is provided for illustrative purposes: To enter the maneuver, increase forward airspeed; the effect will be recognized through the development of a low frequency vibration, pitching up of the nose, and a roll in the direction of the retreating blade. High weight, low rotor RPM, high density altitude, turbulence or steep, abrupt turns are all conducive to retreating blade stall at high forward airspeeds | X | X | Correct recovery from retreating blade stall requires the collective to be lowered first, which reduces blade angles and the angle of attack. Aft cyclic can then be used to slow the helicopter. | |
14. | Translational Lift Effects: Procedure: From a stabilized in-ground-effect (IGE) Hover begin a forward acceleration. When passing through the effective translational lift range, the noticeable effect will be a possible nose pitch-up in some helicopters, an increase in the rate of climb, and a temporary increase in vibration level (in some cases this vibration may be pronounced). This effect is experienced again upon deceleration through the appropriate speed range. During deceleration, the pitch and rate of climb will have the reverse effect, but there will be a similar, temporary increase in vibration level | X | X | X | |
Table C3E—Functions and Subjective Tests
QPS Requirements | ||||
|---|---|---|---|---|
Entry number | Sound system | Simulator level | ||
B | C | D | ||
The following checks are performed during a normal flight profile, motion system ON. | ||||
1. | Precipitation. | X | X | |
2. | Rain removal equipment. | X | X | |
3. | Helicopter noises used by the pilot for normal helicopter operation. | X | X | |
4. | Abnormal operations for which there are associated sound cues, including engine malfunctions, landing gear or tire malfunctions, tail boom | X | X | |
5. | Sound of a crash when the flight simulator is landed in excess of limitations | X | X | |
Table C3F—Functions and Subjective Tests
QPS Requirements | ||||
|---|---|---|---|---|
Entry number | Special effects | Simulator level | ||
B | C | D | ||
This table specifies the minimum special effects necessary for the specified simulator level. | ||||
1. | Braking Dynamics: Representations of the dynamics of brake failure (flight simulator pitch, side-loading, and directional control characteristics representative of the helicopter), including antiskid and decreased brake efficiency due to high brake temperatures (based on helicopter related data), sufficient to enable pilot identification of the problem and implementation of appropriate procedures | X | X | |
2. | Effects of Airframe and Engine Icing: Required only for those helicopters authorized for operations in known icing conditions Procedure: With the simulator airborne, in a clean configuration, nominal altitude and cruise airspeed, autopilot on and auto-throttles off, engine and airfoil anti-ice/de-ice systems deactivated; activate icing conditions at a rate that allows monitoring of simulator and systems response Icing recognition will include an increase in gross weight, airspeed decay, change in simulator pitch attitude, change in engine performance indications (other than due to airspeed changes), and change in data from pitot/static system, or rotor out-of-track/balance. Activate heating, anti-ice, or de-ice systems independently. Recognition will include proper effects of these systems, eventually returning the simulated helicopter to normal flight | X | X | |
Table C3G—Functions and Subjective Tests
QPS Requirements | ||||
|---|---|---|---|---|
Entry number | Instructor Operating Station (IOS) | Simulator level | ||
B | C | D | ||
Functions in this table are subject to evaluation only if appropriate for the helicopter or the system is installed on the specific simulator. | ||||
1. | Simulator Power Switch(es) | X | X | X |
2. | Helicopter conditions. | |||
2.a. | Gross weight, center of gravity, fuel loading and allocation | X | X | X |
2.b. | Helicopter systems status | X | X | X |
2.c. | Ground crew functions | X | X | X |
3. | Airports/Heliports. | |||
3.a. | Number and selection | X | X | X |
3.b. | Runway or landing area selection | X | X | X |
3.c. | Landing surface conditions (rough, smooth, icy, wet, dry, snow) | X | X | X |
3.d. | Preset positions | X | X | X |
3.e. | Lighting controls | X | X | X |
4. | Environmental controls. | |||
4.a | Visibility (statute miles/kilometers) | X | X | X |
4.b. | Runway visual range (in feet/meters) | X | X | X |
4.c. | Temperature | X | X | X |
4.d. | Climate conditions | X | X | X |
4.e. | Wind speed and direction | X | X | X |
5. | Helicopter system malfunctions (Insertion/deletion). | X | X | X |
6. | Locks, Freezes, and Repositioning. | |||
6.a. | Problem (all) freeze/release | X | X | X |
6.b. | Position (geographic) freeze/release | X | X | X |
6.c. | Repositioning (locations, freezes, and releases) | X | X | X |
6.d. | Ground speed control | X | X | X |
7. | Remote IOS. | X | X | X |
8. | Sound Controls. On/off/adjustment | X | X | X |
9. | Motion/Control Loading System. | |||
9.a. | On/off/emergency stop | X | X | X |
10. | Observer Seats/Stations. Position/Adjustment/Positive restraint system | X | X | X |
Attachment 4 to Appendix C to Part 60—SAMPLE DOCUMENTS
Table of Contents
Title of Sample
Figure C4A Sample Letter, Request for Initial, Upgrade, or Reinstatement Evaluation.
Figure C4B Attachment: FFS Information Form
Figure A4C Sample Letter of Compliance
Figure C4D Sample Qualification Test Guide Cover Page
Figure C4E Sample Statement of Qualification—Certificate
Figure C4F Sample Statement of Qualification—Configuration List
Figure C4G Sample Statement of Qualification—List of Qualified Tasks
Figure C4H Sample Continuing Qualification Evaluation Requirements Page
Figure C4I Sample MQTG Index of Effective FFS Directives
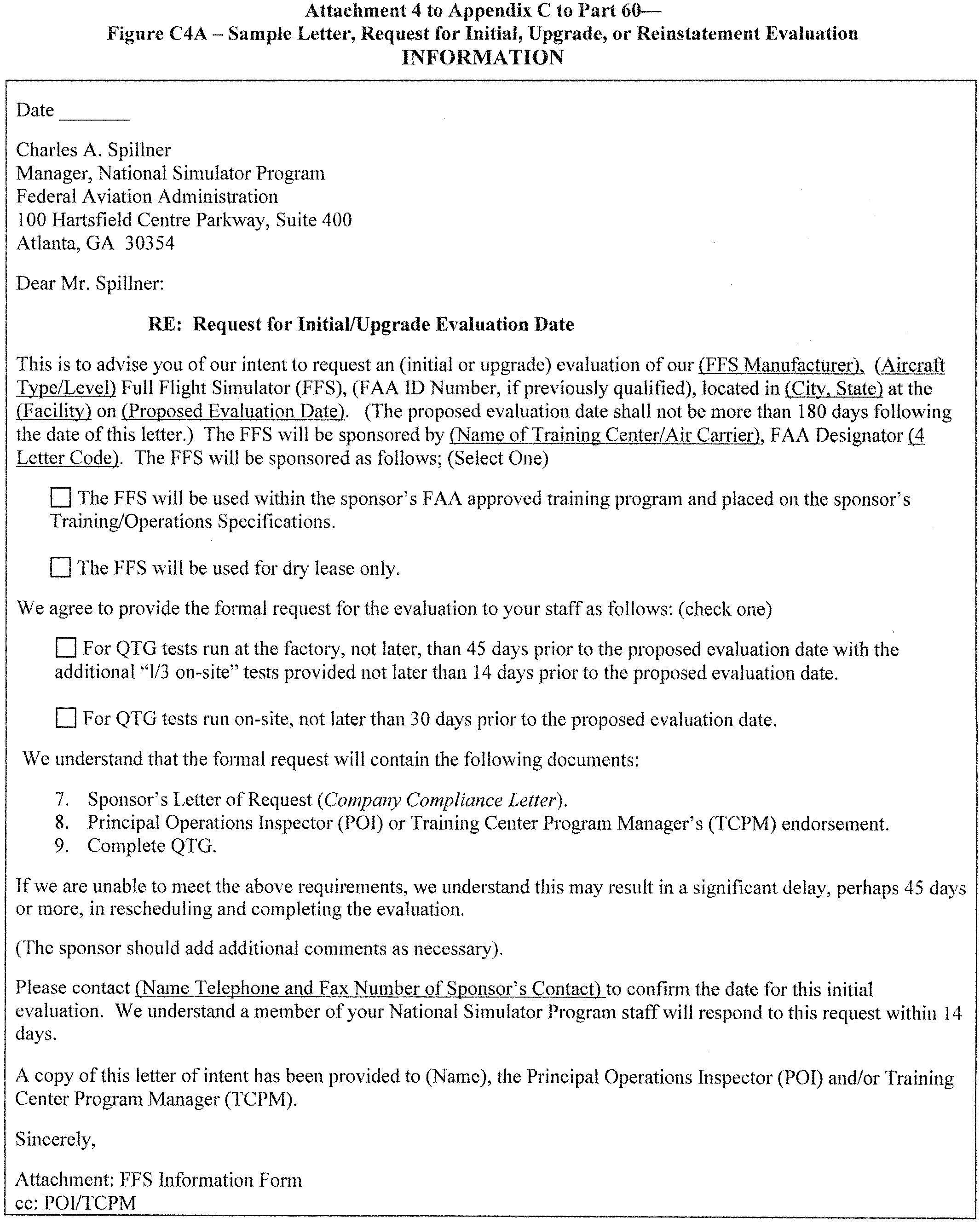
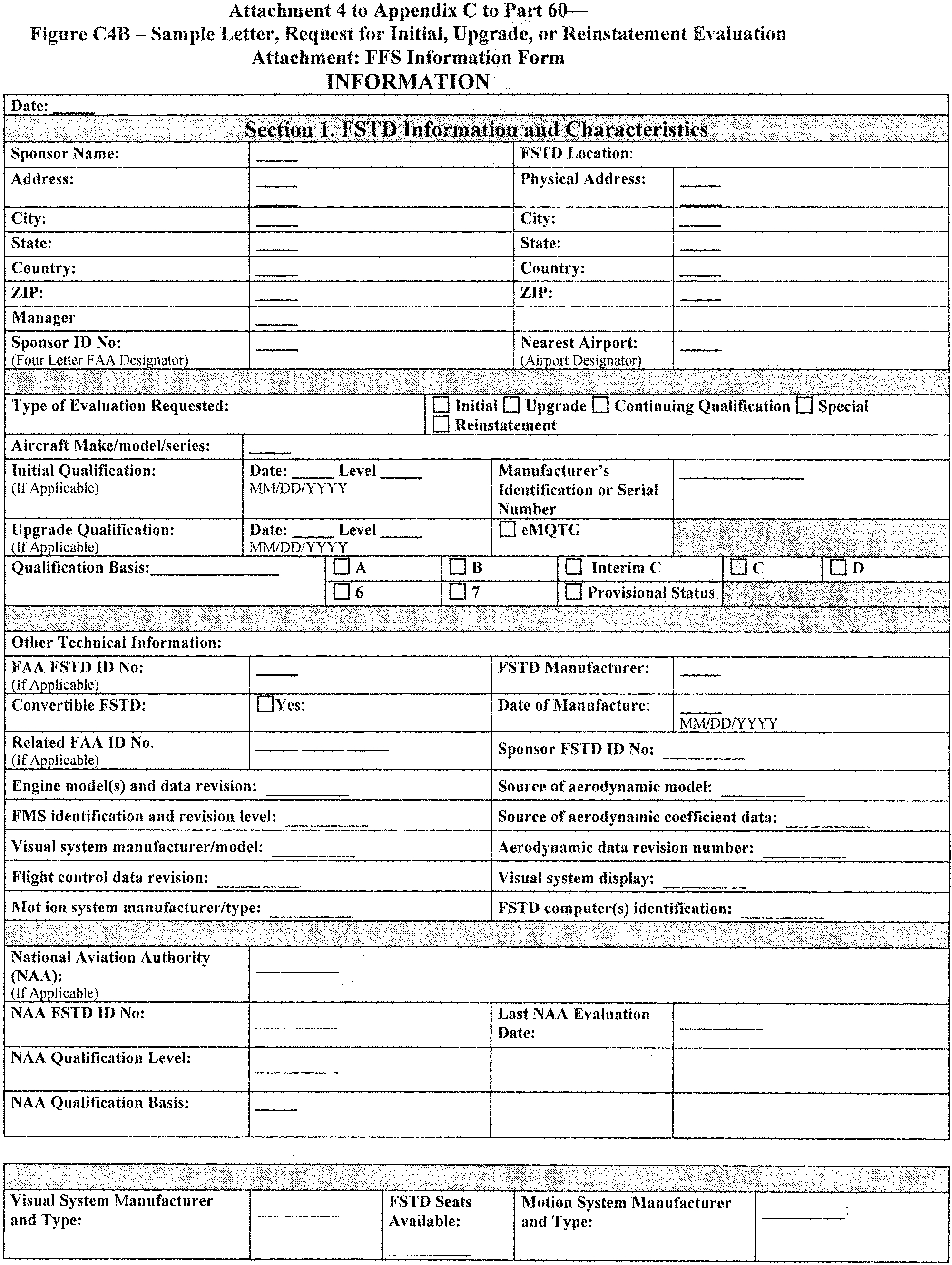
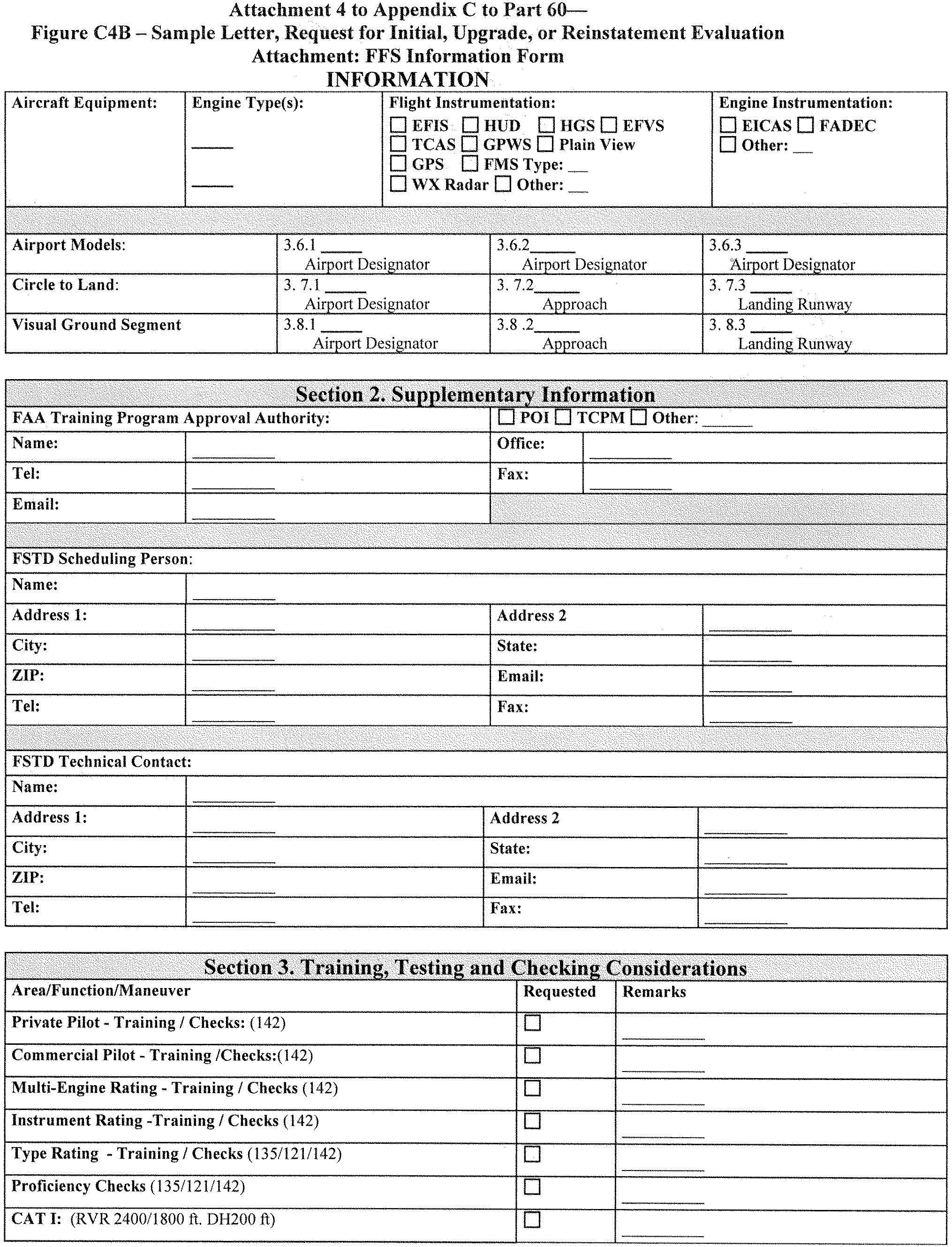
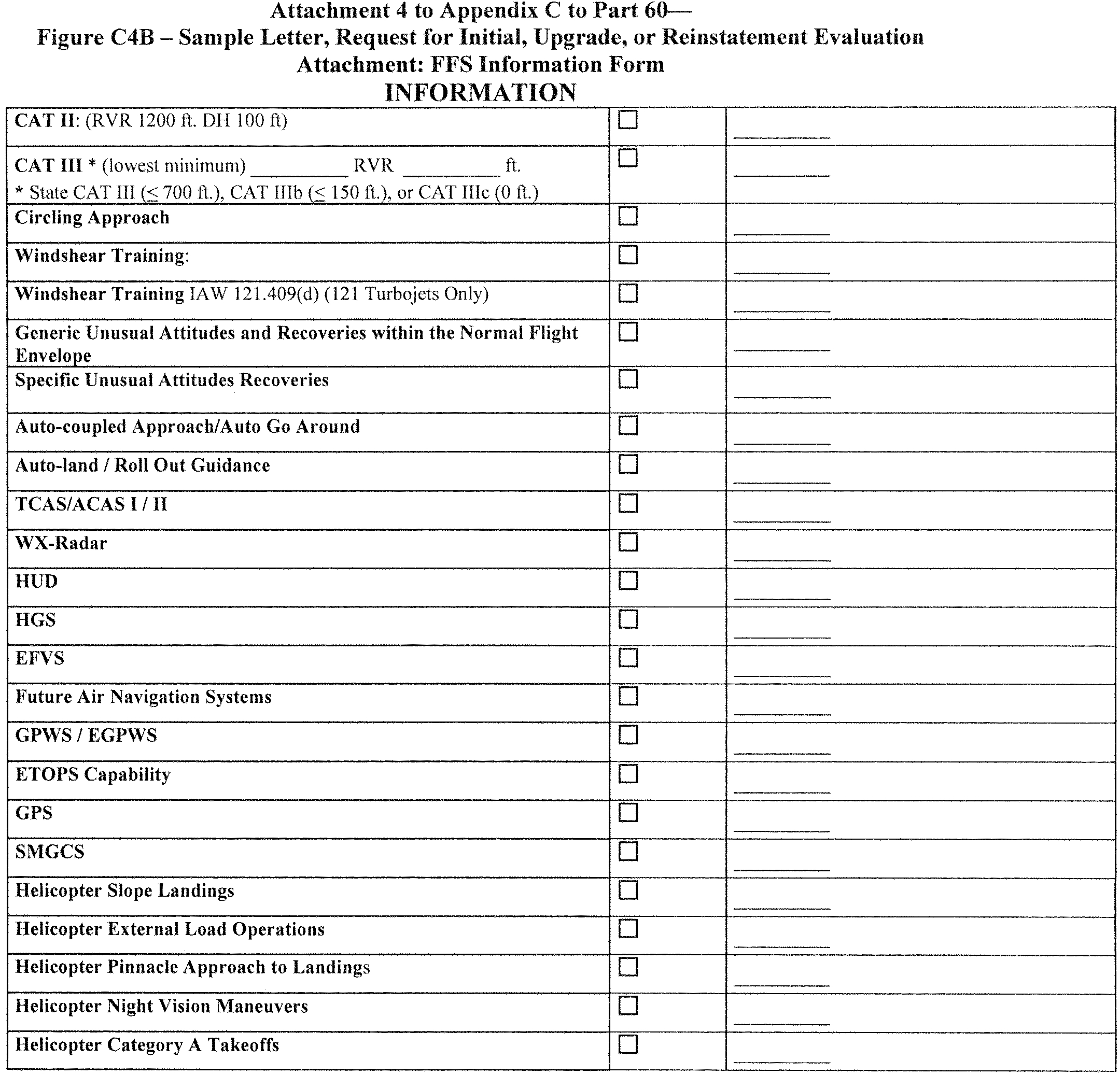
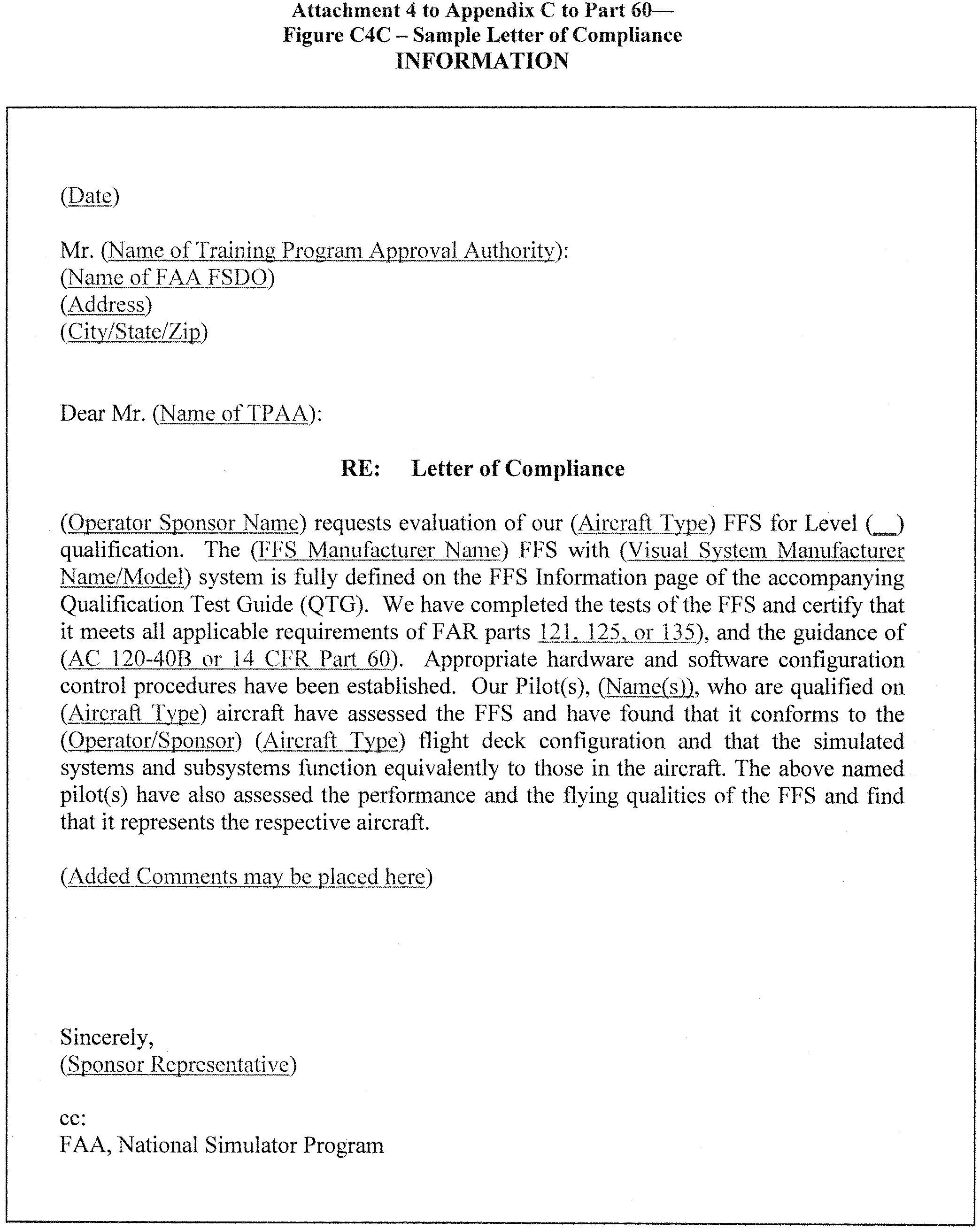
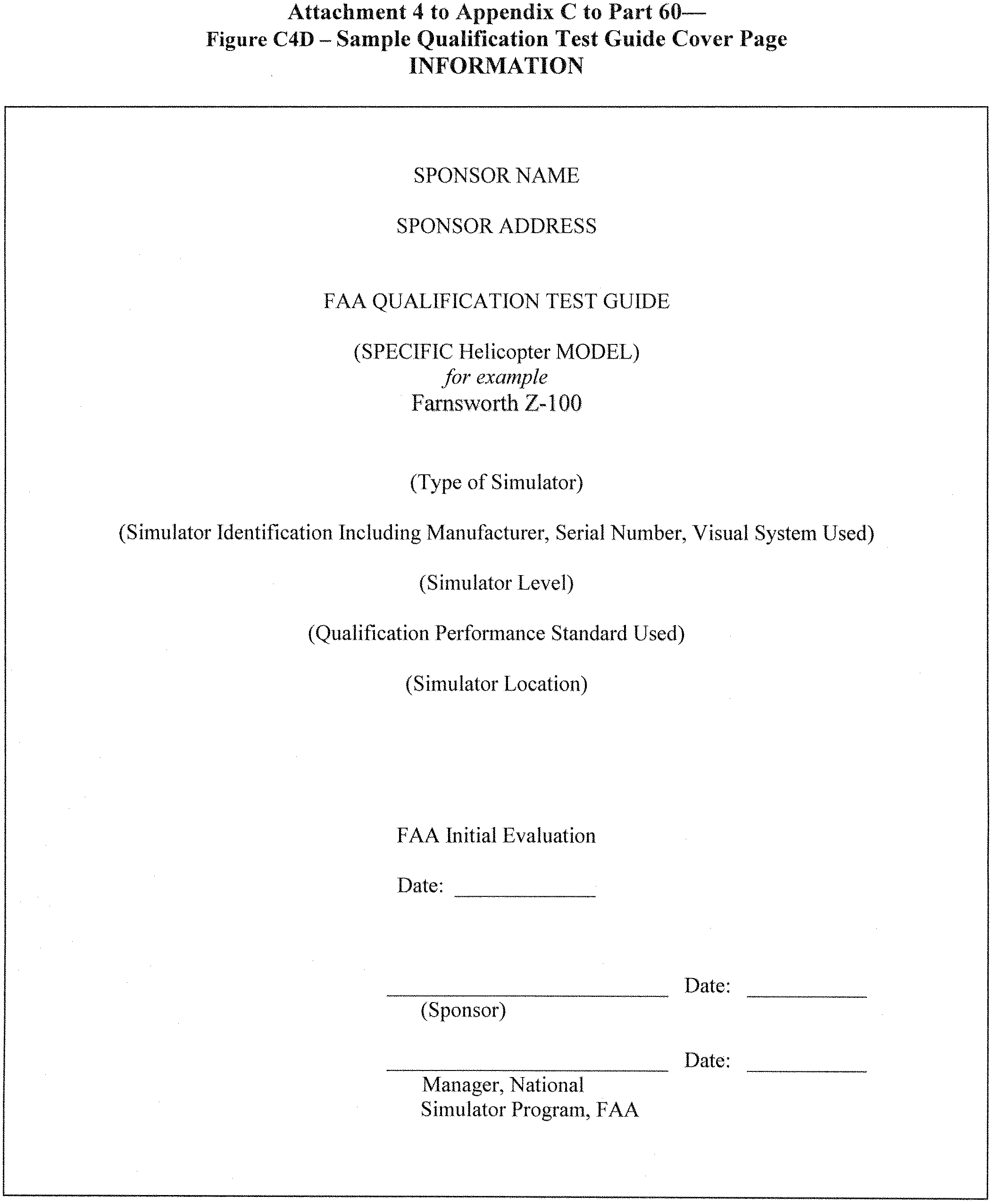

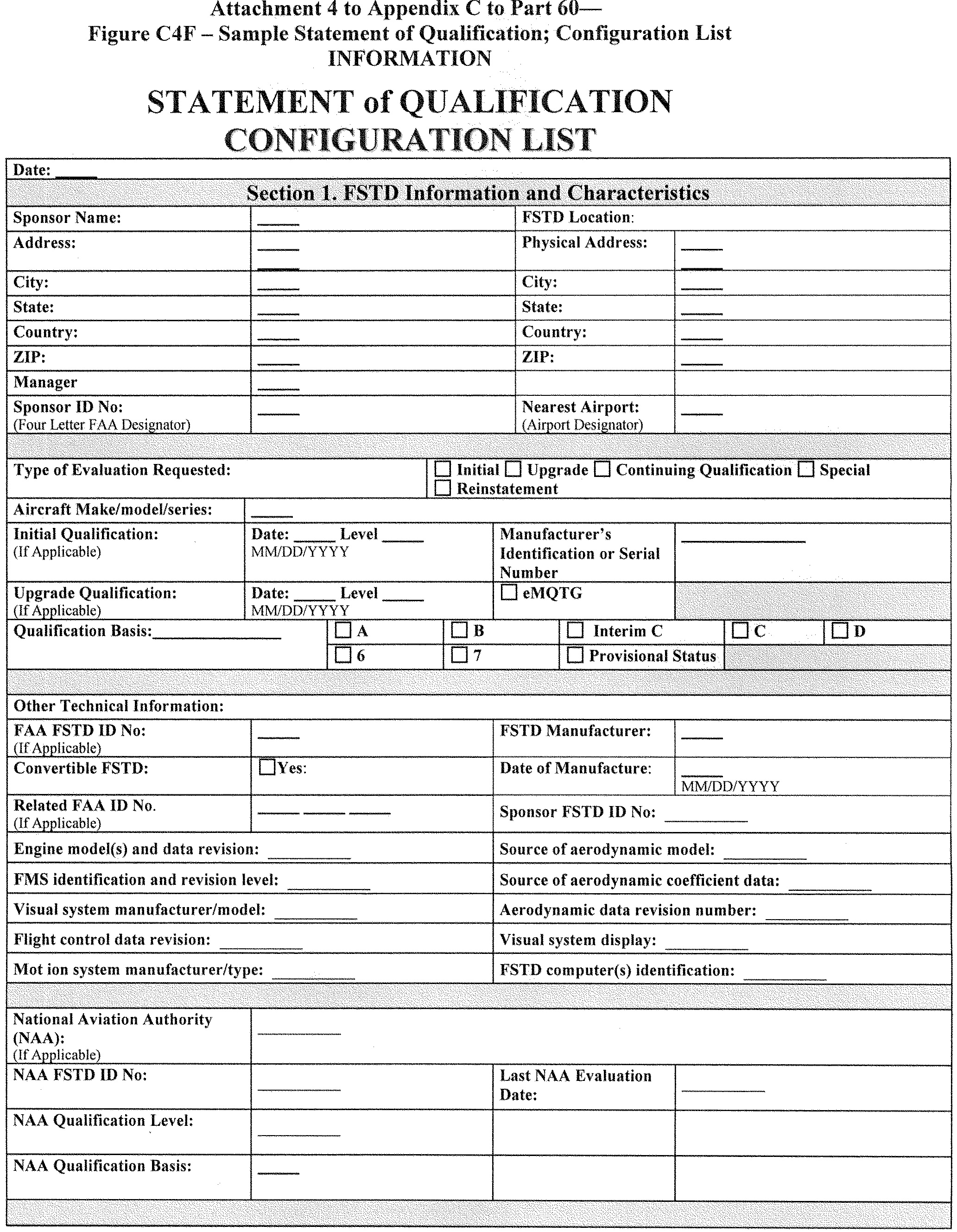
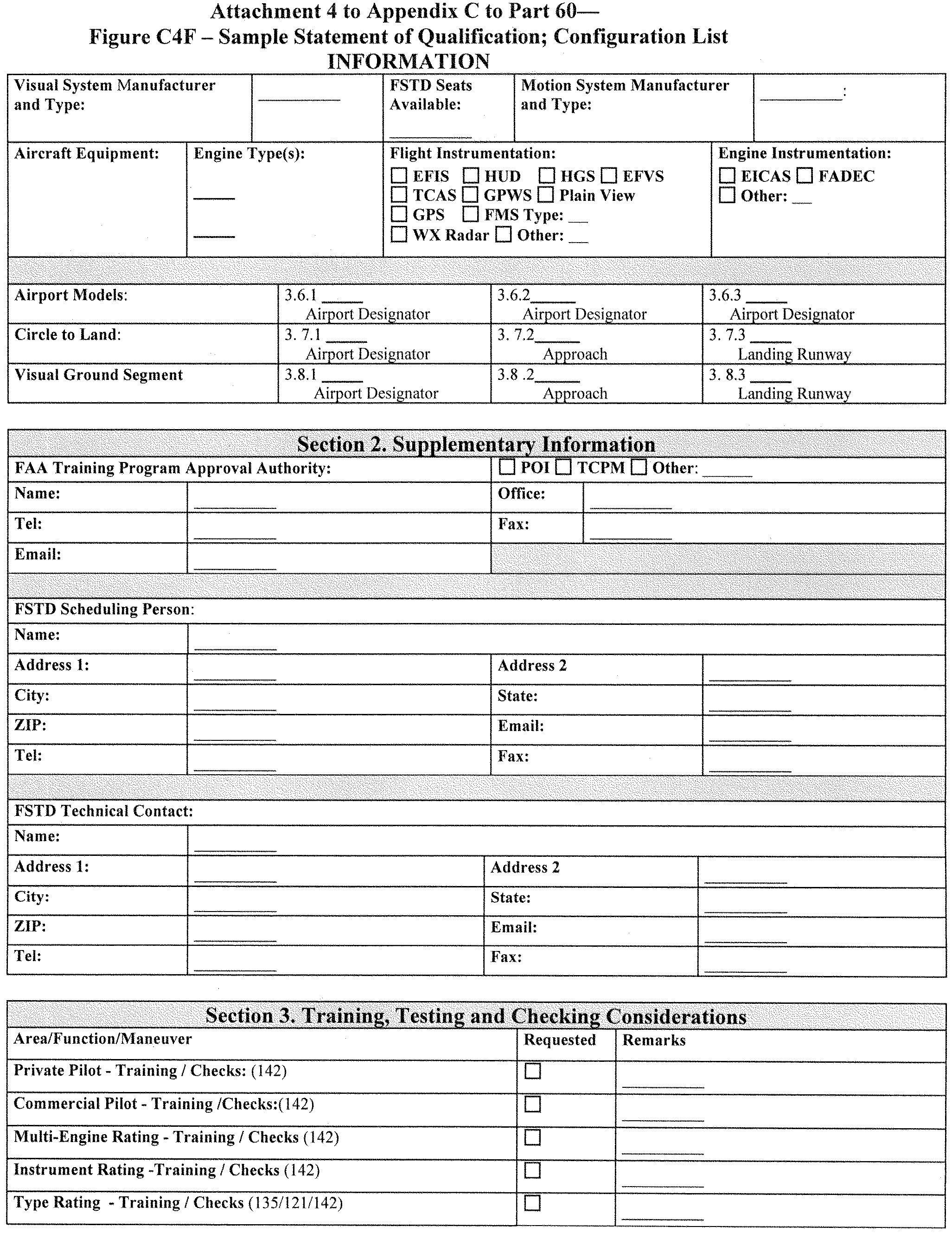
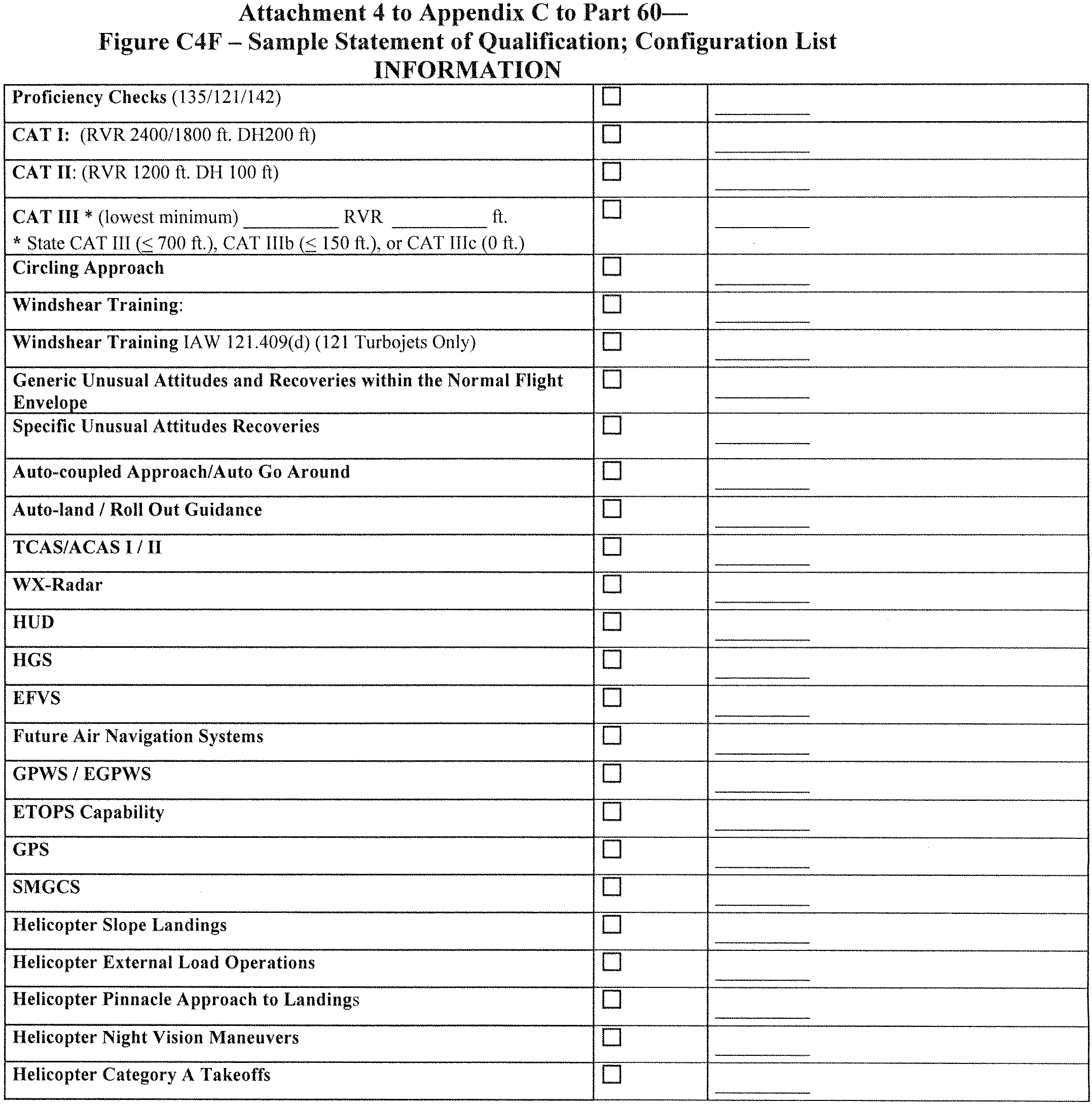
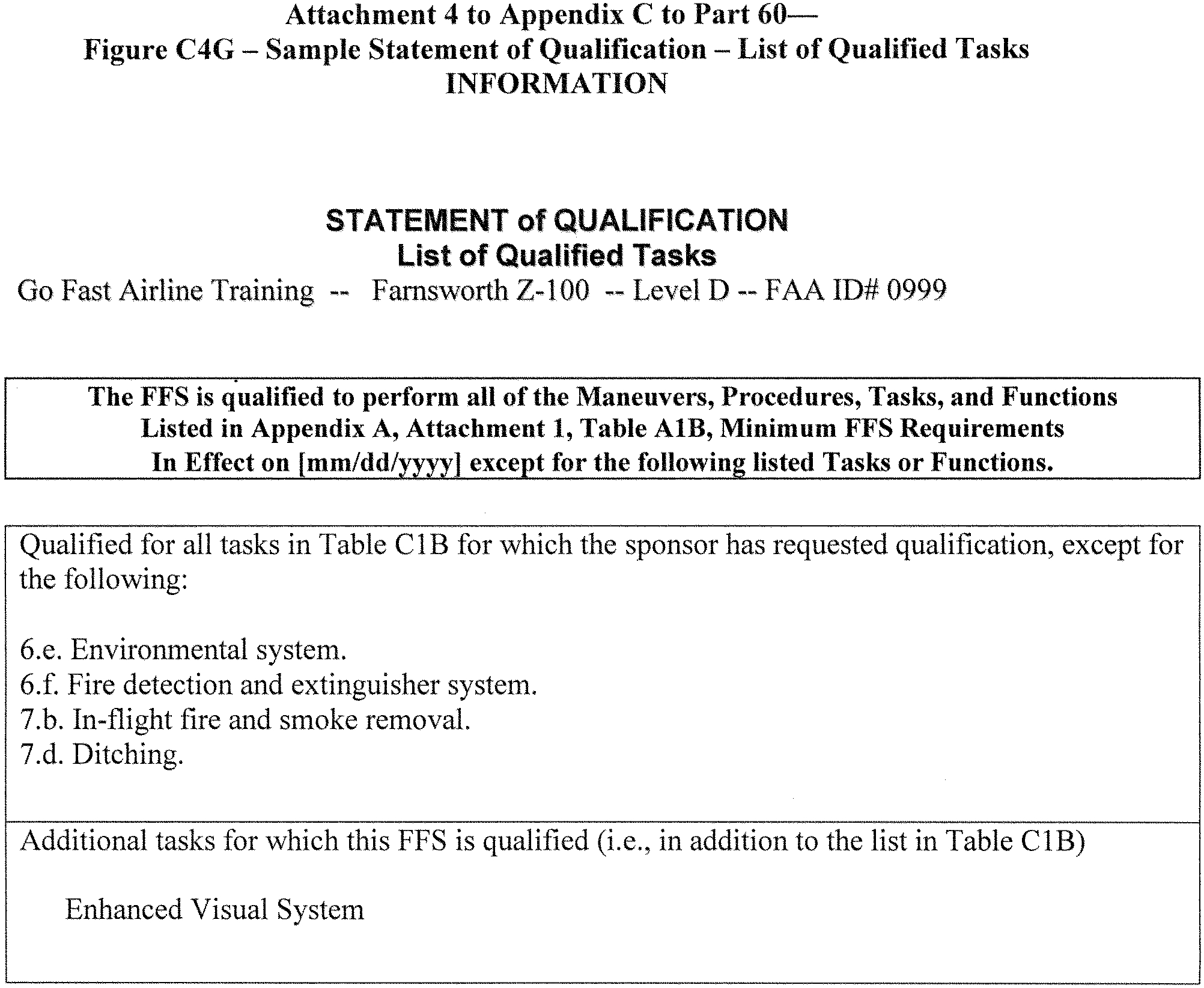
Attachment 5 to Appendix C to Part 60—FSTD DIRECTIVES APPLICABLE TO HELICOPTER FFSs
Flight Simulation Training Device (FSTD) Directive
FSTD Directive 1. Applicable to all FFSs, regardless of the original qualification basis and qualification date (original or upgrade), having Class II or Class III airport models available.
Agency: Federal Aviation Administration (FAA), DOT
Action: This is a retroactive requirement to have all Class II or Class III airport models meet current requirements.
Summary: Notwithstanding the authorization listed in paragraph 13b in Appendices A and C of this part, this FSTD Directive requires each certificate holder to ensure that by May 30, 2009, except for the airport model(s) used to qualify the simulator at the designated level, each airport model used by the certificate holder's instructors or evaluators for training, checking, or testing under this chapter in an FFS, meets the definition of a Class II or Class III airport model as defined in 14CFR part 60. The completion of this requirement will not require a report, and the method used for keeping instructors and evaluators apprised of the airport models that meet Class II or Class III requirements on any given simulator is at the option of the certificate holder whose employees are using the FFS, but the method used must be available for review by the TPAA for that certificate holder.
Dates: FSTD Directive 1 becomes effective on May 30, 2008.
For Further Information Contact: Ed Cook, Senior Advisor to the Division Manager, Air Transportation Division, AFS-200, 800 Independence Ave, SW, Washington, DC, 20591: telephone: (404) 832-4701; fax: (404) 761-8906.
Specific Requirements:
1. Part 60 requires that each FSTD be:
a. Sponsored by a person holding or applying for an FAA operating certificate under Part 119, Part 141, or Part 142, or holding or applying for an FAA-approved training program under Part 63, Appendix C, for flight engineers, and
b. Evaluated and issued an SOQ for a specific FSTD level.
2. FFSs also require the installation of a visual system that is capable of providing an out-of-the-flight-deck view of airport models. However, historically these airport models were not routinely evaluated or required to meet any standardized criteria. This has led to qualified simulators containing airport models being used to meet FAA-approved training, testing, or checking requirements with potentially incorrect or inappropriate visual references.
3. To prevent this from occurring in the future, by May 30, 2009, except for the airport model(s) used to qualify the simulator at the designated level, each certificate holder must assure that each airport model used for training, testing, or checking under this chapter in a qualified FFS meets the definition of a Class II or Class III airport model as defined in Appendix F of this part.
4. These references describe the requirements for visual scene management and the minimum distances from which runway or landing area features must be visible for all levels of simulator. The visual scene or airport model must provide, for each “in-use runway” or “in-use landing area,” runway or landing area surface and markings, runway or landing area lighting, taxiway surface and markings, and taxiway lighting. Additional requirements include correlation of the visual scenes or airport models with other aspects of the airport environment, correlation of the aircraft and associated equipment, scene quality assessment features, and the extent to which the instructor is able to exercise control of these scenes or models.
5. For circling approaches, all requirements of this section apply to the runway used for the initial approach and to the runway of intended landing.
6. The details in these scenes or models must be developed using airport pictures, construction drawings and maps, or other similar data, or be developed in accordance with published regulatory material. However, FSTD Directive 1 does not require that airport models contain details that are beyond the initially designed capability of the visual system, as currently qualified. The recognized limitations to visual systems are as follows:
a. Visual systems not required to have runway numbers as a part of the specific runway marking requirements are:
(1) Link NVS and DNVS.
(2) Novoview 2500 and 6000.
(3) FlightSafety VITAL series up to, and including, VITAL III, but not beyond.
(4) Redifusion SP1, SP1T, and SP2.
b. Visual systems required to display runway numbers only for LOFT scenes are:
(1) FlightSafety VITAL IV.
(2) Redifusion SP3 and SP3T.
(3) Link-Miles Image II.
c. Visual systems not required to have accurate taxiway edge lighting are:
(1) Redifusion SP1.
(2) FlightSafety Vital IV.
(3) Link-Miles Image II and Image IIT
(4) XKD displays (even though the XKD image generator is capable of generating blue colored lights, the display cannot accommodate that color).
7. A copy of this Directive must be filed in the MQTG in the designated FSTD Directive Section, and its inclusion must be annotated on the Index of Effective FSTD Directives chart. See Attachment 4, Appendices A through D of this part for a sample MQTG Index of Effective FSTD Directives chart.
[Doc. No. FAA-2002-12461, 73 FR 26490, May 9, 2008]